Kontrol ng contactor at mga circuit ng proteksyon ng motor
 Depende sa function na isasagawa, mayroong iba't ibang contactor motor control circuits.
Depende sa function na isasagawa, mayroong iba't ibang contactor motor control circuits.
Ang Figure 1a ay nagpapakita ng isang pinagsamang pamamaraan ng isang hindi maibabalik na magnetic starter... Sa loob nito, ang pag-aayos ng mga elemento ay tumutugma sa pag-aayos sa kalikasan, iyon ay, ang lahat ng mga elemento na matatagpuan sa starter box ay pinagsama-sama sa kaliwang bahagi ng diagram, at istasyon ng push button na may mga button na «Start» at «Stop». ipinapakita sa kanang bahagi ng diagram.
Ang istasyon ng pindutan ay karaniwang matatagpuan ilang distansya mula sa magnetic starter… Upang maunawaan ang prinsipyo ng pagpapatakbo ng motor control circuit, ang mga detalyadong (pangunahing) diagram ay karaniwang ginagamit (Larawan 1.b). Sa pamamagitan ng pagpindot sa SB2 start button, ang KM contactor coil circuit ay sarado, na kinabibilangan ng tatlong KM contact ng motor supply circuit. Sa kasong ito, ang block contact na KM na konektado sa parallel sa start button na SB2 ay magsasara din. Ito ay nagpapahintulot sa iyo na pasiglahin ang KM coil kapag ang SB2 button ay pinakawalan.
Ang motor ay huminto sa pamamagitan ng pagpindot sa SB1 na buton habang ang coil ay naka-off at nilalabas ang power (pangunahing) contact at ang auxiliary contact. Kapag ang SB1 button ay pinakawalan, ang circuit ng coil KM ay mawawalan ng lakas. Upang i-restart ang makina, pindutin muli ang SB2 button.
Nagbibigay din ang circuit na ito ng tinatawag na zero protection, iyon ay, kung ang boltahe ng mains ay nawala o bumaba sa 50-60% ng nominal, ang KM coil ay hindi hahawakan ang KM power contacts at ang motor ay papatayin. Kapag ang isang boltahe ay lumitaw o tumaas sa isang halaga na malapit sa nominal na halaga, ang magnetic starter ay hindi kusang makisali. Upang i-on ito, kailangan mong pindutin muli ang start button.
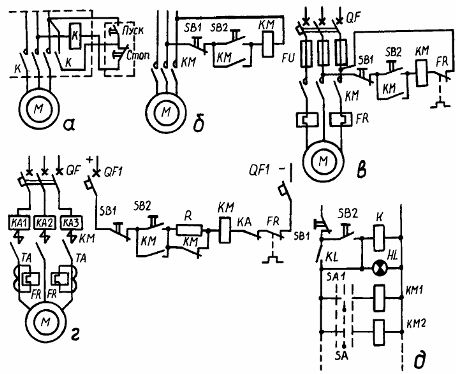
kanin. 1. Mga scheme ng kontrol at proteksyon ng motor: a — pinagsama at b — detalyadong pamamaraan ng isang hindi maibabalik na magnetic starter; c — proteksyon ng makina sa pamamagitan ng mga piyus at thermal relay; d - diagram ng malakas na istasyon ng kontrol ng engine; d — zero na proteksyon mula sa isang intermediate relay
Ang proteksyon ng motor mula sa overheating ng winding ay isinasagawa sa panahon ng matagal na labis na karga mga thermal relay FR, at ang proteksyon laban sa malalaking overload o short circuit ay ibinibigay ng mga piyus na FU o mga circuit breaker QF (Larawan 1, c). Upang maprotektahan laban sa matagal na labis na karga, dalawang thermal relay ang ginagamit, dahil sa isang relay, kung sakaling sumabog ang fuse, sa serye kung saan ang elemento ng pag-init ng relay na ito ay konektado, ang motor ay konektado sa isang single-phase network at hindi sila mapoprotektahan. Ang mga breaking contact ng mga relay na ito ay konektado sa serye sa starter coil. Kapag ang isa sa mga ito ay bumukas, ang KM coil ay de-energized at ang motor ay huminto, tulad ng kapag ang SB1 button ay pinindot.
Ang isang high power motor control station ay ipinapakita sa fig. 1, d. Ang proteksyon ng short-circuit ay ibinibigay ng overload relay KA1 — KA3, ang overload na proteksyon ay ibinibigay ng mga thermal relay na FR na konektado sa pamamagitan ng kasalukuyang mga transformer. Ang coil ng isang three-pole contactor ay ibinibigay ng direktang kasalukuyang. Upang mabawasan ang kasalukuyang sa contactor coil pagkatapos ng pagsasama nito sa circuit, ang isang karagdagang paglaban R ay ipinakilala, na dati ay pinaikli ng bukas na contact KM.
Sa mga manual control circuit na may maraming controller, switch, o iba pang device, ginagamit ang mga intermediate relay para magbigay ng neutral na proteksyon. (Larawan 1, e) Upang ilapat ang boltahe sa control circuit, pindutin ang button na SB2, sa gayon ay i-on ang intermediate relay K, na kinabibilangan ng pagsasara ng contact na K at ang signal lamp na HL, na nagpapahiwatig ng pagkakaroon ng boltahe sa control circuit . Pagkatapos bitawan ang SB2 button, ang relay coil ay ma-block habang ang mga circuit ng SM1 controller, SM packet switch, atbp. at ang mga coils ng contactors KM1, KM2, atbp., ay magiging energized.
Sa isinasaalang-alang na mga scheme, ang mga self-locking contact ay kinakailangan para sa patuloy na operasyon ng mga motor. Kadalasan sa pagsasanay ang makina ay kailangan lamang na tumakbo kapag pinindot ang pindutan ng pagsisimula, halimbawa sa mga nakakataas na makina. Sa kasong ito, walang Stop button sa control circuit (Larawan 2, a). Minsan kinakailangan upang matiyak ang pagpapatakbo ng drive sa dalawang mga mode, iyon ay, upang i-on ito sa maikling panahon kapag nagse-set up ng makina o sa mahabang panahon. Pagkatapos, sa isang maikling pagpindot sa button na SB2 (Fig. 2.b), ang coil ng contactor KM ay mag-o-on at ang self-locking contact ng KM ay magsasara, habang ang motor ay tatakbo kapag ang button na SB2 ay inilabas. .
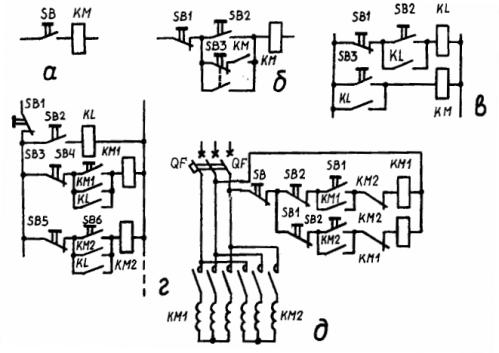
kanin. 2. Mga uri ng control circuit para sa mga asynchronous na motor: a — sa jogging mode; b at c - sa panahon ng matagal na trabaho at jogging; d - sabay-sabay na pagsasama ng ilang mga makina; d - walang hakbang na pagsisimula ng isang dalawang-bilis na motor
Para sa motor control mode, pindutin ang SB3 button, ang pagsasara ng contact nito ay i-on ang coil ng contactor KM, at ang opening contact ay sinira ang self-locking circuit ng contactor. Ang kawalan ng circuit na ito ay ang bukas na contact ng SB3 button ay maaaring magsara bago magbukas ang contact ng KM block at ang motor ay hindi patayin. Ang circuit na ipinapakita sa fig. 2, f, ay walang ganitong depekto.
Para sa tuluy-tuloy na operasyon, ang pagpindot sa pindutan ng SB2 ay lumiliko sa intermediate relay K. Ang isa sa mga contact K ay lumiliko sa coil ng contactor KM, at ang isa ay sabay-sabay na hinaharangan ang pindutan ng SB2, sa gayon ay pinapatay ang pagpapatakbo ng engine gamit ang pindutan ng pagsisimula pinakawalan. Upang simulan ang operasyon, pindutin ang SB3 button at hawakan ito para sa kinakailangang oras.
Ang Figure 2d ay nagpapakita ng isang pamamaraan para sa pagsisimula ng ilang mga motor sa parehong oras mula sa isang pindutan ng pagsisimula gamit ang isang intermediate relay ... Pindutan SB2 ay lumiliko sa relay K, ang pagsasara ng mga contact na kung saan sabay-sabay na i-on ang mga coils ng contactors KM1, KM2, atbp. Ihinto ang lahat ng mga motor nang sabay-sabay sa pindutan ng SB1. Upang isa-isang i-on at i-off ang bawat motor, gamitin ang mga button na SB3, SB4 at SB5, SB6, atbp. ayon sa pagkakabanggit.
Isang stepless na panimulang diagram ng isang two-speed two-winding squirrel-cage rotor motor na ipinapakita sa Fig. 2, e. Upang simulan ang makina sa unang bilis, ang button na SB1 ay ginagamit, sa pangalawa - SB2.Ang parehong mga pindutan ay mechanically interlocked upang maiwasan ang engine mula sa umaakit sa dalawang bilis sa parehong oras.
Ang mga starter circuit ay naka-block din sa kuryente. Kaya, kapag, halimbawa, ang coil KM1 ay pinaandar, ang pambungad na contact ay sumisira sa circuit ng coil KM2, hindi kasama ang posibilidad ng pagsasama nito. Upang lumipat sa pangalawang bilis, kailangan mong pindutin ang pindutan ng SB2, habang ang circuit ng coil KM1 ay nasira at ito ay naka-off. Ang coil ng KM2 circuit ay tumatanggap ng kapangyarihan at i-on ang motor sa pangalawang bilis.
Ang reverse control ng mga asynchronous na motor ay isinasagawa gamit ang dalawang contactor (Larawan 3, a).
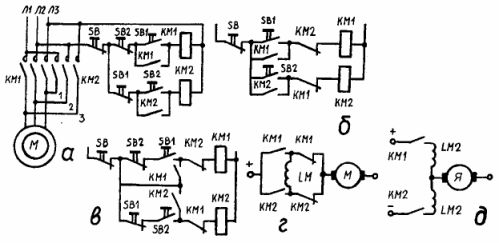
Fig. 3. Mga scheme ng kontrol ng makina: a — nababaligtad na magnetic starter na may mekanikal na pagharang; b - pareho sa electrical blocking; c — isang kumbinasyon ng mga opsyon a at b; d at e — pagsisimula at pag-reverse ng mga low power na DC motor
Ginagamit ang contactor KM1 upang i-on ang motor sa pasulong at ang KM2 ay ginagamit sa reverse. Upang maiwasan ang hindi sinasadyang sabay-sabay na pag-on ng dalawang contactor, na humahantong sa isang maikling circuit, ang circuit ay gumagamit (tingnan ang Fig. 3, a) mutual mechanical blocking na may dalawang nakakaabala na mga contact ng mga pindutan SB1 at SB2. Pagpindot sa pindutan SB1, i-on ang circuit ng coil KM1 at idiskonekta ang coil circuit KM2.
Kapag ang mga pindutan ng SB1 at SB2 ay pinindot nang sabay-sabay, ang mga circuit ng mga coils na KM1 at KM2 ay nasira at wala sa mga contactor ang mag-o-on. Ang pagharang ay isinasagawa ng dalawang nakakaabala na mga contact na KM2 at KM1, na kasama sa mga circuit ng coils KM1 at KM2, ayon sa pagkakabanggit (Larawan 3, b). Upang baligtarin ang makina sa scheme na ito, kailangan mo munang pindutin ang SB button.
Ang circuit sa fig. 3, c ay isang kumbinasyon ng dalawang nakaraang mga circuit, iyon ay, mayroong double blocking.Ang pindutan ng SBI ay lumiliko sa contactor KM1, at ang circuit ng coil ng contactor KM2 ay nasira ng sabay-sabay na bukas na contact ng button na SB1 at ang contact ng block KM1.
Ipinapakita ng Figure 3, d at e ang pinakasimpleng mga scheme para sa pagsisimula at pag-reverse ng mga low-power na sunud-sunod na excited na mga motor ... Ang mga naturang motor ay konektado sa network nang hindi nagsisimula ang mga rheostat. Ayon sa diagram sa fig. 3, d, ang pagsisimula at pag-reverse ng motor na may serye ng paggulo ay isinasagawa sa pamamagitan ng dalawang intermediate relay. Ang motor ay baligtad sa pamamagitan ng pag-reverse ng direksyon ng kasalukuyang sa LM field coil. Sa mga motor na may dalawang serye na field windings na lumilikha ng mga magnetic flux sa magkasalungat na direksyon, ang switching at reversing circuit ay mayroon lamang dalawang contact contact (tingnan ang Fig. 3, e).
Tulad ng makikita mula sa itinuturing na mga control scheme, ito ay pinakamadaling i-automate ang proseso ng pagsisimula at pag-reverse ng squirrel-cage rotor asynchronous na motors. Sa kasong ito, ang lahat ng kontrol kapag nagsisimula ay nabawasan sa pagkonekta sa motor sa network ng kuryente, at kapag huminto - sa pagdiskonekta mula sa network.
Ang mas kumplikado ay ang automation ng pagsisimula, paghinto at paghinto ng mga induction motor na may phase winding ng rotor, induction squirrel-cage motors ng mas mataas na kapangyarihan, DC motors ng medium at high power, multi-speed induction motors na may step start, pati na rin bilang kasabay na mga motor. Ang mga makinang ito ay kinokontrol bilang isang function ng oras, bilis at kasalukuyang.
Bilang karagdagan sa mga kaso sa itaas, ang kontrol ng engine ay maaaring isagawa at ayon sa prinsipyo ng landas, kapag ang makina ay nagsimula at bumagal kapag ang gumaganang katawan ay umabot sa isang tiyak na posisyon sa espasyo.Ang mga system na gumaganap ng mga naturang function ay tinatawag na open-loop system dahil wala silang feedback sa pagitan ng output value at input value.