Mga electric circuit ng electric drive ng overhead cranes na pinapatakbo mula sa sahig
Mga diagram ng gripo at mga tampok na proteksiyon
 Sa industriya, sa panahon ng mababang-intensity na mga operasyon sa transportasyon at imbakan, sa mga silid ng makina at mga silid ng laboratoryo, isang malaking bilang ng mga overhead crane ang ginagamit, na tumatakbo nang paminsan-minsan o may bilang ng mga lifting cycle na 6 - 10 kada oras. Hindi praktikal sa ekonomiya na gumamit ng mga full-time na operator para sa mga naturang crane. Ito ang dahilan kung bakit dumarami ang mga overhead crane na pinapatakbo mula sa sahig.
Sa industriya, sa panahon ng mababang-intensity na mga operasyon sa transportasyon at imbakan, sa mga silid ng makina at mga silid ng laboratoryo, isang malaking bilang ng mga overhead crane ang ginagamit, na tumatakbo nang paminsan-minsan o may bilang ng mga lifting cycle na 6 - 10 kada oras. Hindi praktikal sa ekonomiya na gumamit ng mga full-time na operator para sa mga naturang crane. Ito ang dahilan kung bakit dumarami ang mga overhead crane na pinapatakbo mula sa sahig.
Ang isang tampok ng mga bridge crane na kinokontrol mula sa sahig ay ang posibilidad ng pag-access sa crane para sa pagkumpuni at kontrol lamang sa mga espesyal na itinalagang lugar na nilagyan ng angkop na mga lugar para sa pagsuri ng mga mekanismo at mga de-koryenteng kagamitan. Samakatuwid, ang buong sistema ng proteksyon ng mga de-koryenteng kagamitan ng kreyn ay dapat na itayo sa paraang ang kreyn sa ilalim ng mga kondisyong pang-emerhensiya ay madadala sa lugar ng pagkukumpuni sa ilalim ng kontrol mula sa sahig at sa kawalan ng kreyn sa circuit mga short circuit at ground fault.
Kaugnay nito, sa floor-operated cranes, mga circuit breaker ay hindi naka-install.Ang mga pangunahing circuit ay protektado ng isang awtomatikong switch ng kuryente mga pangunahing cartat proteksyon ng mga control circuit - mga piyus para sa mga alon 15 A, 380 V na may isang cross-section ng conductors ng control circuits 2.5 mm2. Ang overload na proteksyon ng mga electric drive ng mga mekanismo ay isinasagawa mga thermal relay sa mga pangunahing circuit ng mga makina.
Upang paganahin ang faucet na gumalaw pagkatapos ma-trigger ang thermal protection, ang mga contact ng relay ay konektado sa isang button sa control panel. Ang balbula ay nilagyan ng mga signal lamp para sa pagkakaroon ng boltahe sa input, boltahe pagkatapos ng contactor para sa proteksyon ng linya at isang signal lamp para sa pagpapatakbo ng thermal protection.
Mga de-koryenteng diagram ng mga mekanismo para sa paggalaw ng mga overhead crane
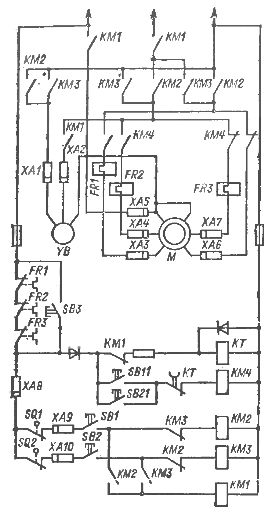
Sa fig. Ang 1 ay nagpapakita ng isang diagram ng isang electric drive na gumagalaw sa ilalim ng short-circuit na kontrol ng isang single-speed na motor.
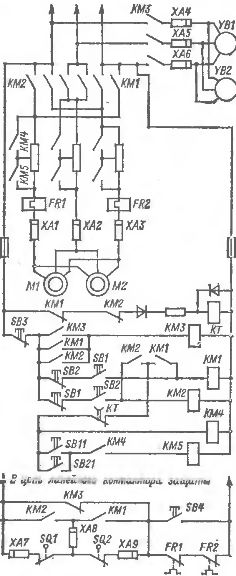
kanin. 1. Scheme ng electric drive (na may single-speed squirrel-cage motor) ng crane movement mechanism kapag pinaandar mula sa sahig: M1, M2 — electric motors, YB1, YB2 — electromagnets of brakes o electrohydraulic pushers, KM1, KM2 — directional contactors, KM4, KM5 — resistor contactor sa circuit stators, KMZ — brake contactor, KT — start-up time relay, FR1, FR2 — thermal relays, SQ1, SQ2 — limit switch, SB1, SB2 — mga pindutan ng direksyon ng paggalaw (dalawa - way), SB11, SB21 — mga start button, SB3 — free movement stop button, SB4 — thermal protection bypass button, XA1 — XA9 — mga contact ng kasalukuyang mga transfer cart
Ang circuit na ito ay idinisenyo upang himukin ang mga bogie crane na may kapasidad ng pagkarga na 3-20 tonelada at mga crane drive para sa mga crane na may kapasidad ng pagkarga na 2-5 tonelada. Ang mga stator windings ng isang squirrel-cage motor ay pinapakain mula sa mains sa pamamagitan ng dalawang yugto ng mga resistor. Ang mga mekanikal na katangian ng drive ay ipinapakita sa Fig. 2, a.
Kontrol ng electric drive — mula sa mga suspendido na pindutan. Kasama sa control ang dalawang pangunahing two-way na button na SB1 at SB2, na nagbibigay ng utos na lumipat sa dalawang direksyon. Ang paglipat sa isang posisyon nang walang pagsasaayos ng mga resistor ay isinasagawa kapag ang mga utos ay inisyu gamit ang mga pindutan SB11, SB21.
Kapag naka-on ang makina, ang kapangyarihan sa YB brake drive ay ibinibigay sa pamamagitan ng mga contact ng mga contactor na KM1, KM2 sa pamamagitan ng mga contact ng KMZ. Pagkatapos patayin ang de-koryenteng motor, ang brake drive ay patuloy na tumatanggap ng kapangyarihan at ang mekanismo ay may libreng pagtakbo. Para bitawan ang preno, gamitin ang SB3 button, na karaniwan sa bogie at sa mekanismo ng axle. Kapag na-trigger limit switch SQ1 at SQ2, ang protective line contactor ay tripped at superimposed mekanikal na preno.
Upang magbigay ng kuryente tapat ng pagpepreno pagkatapos gamitin ang libreng boot relay ng oras CT na may time delay na 2-3 s, na nagpapabagal sa pagmamaneho sa isang posisyon na may pinakamababang panimulang (braking) na metalikang kuwintas.
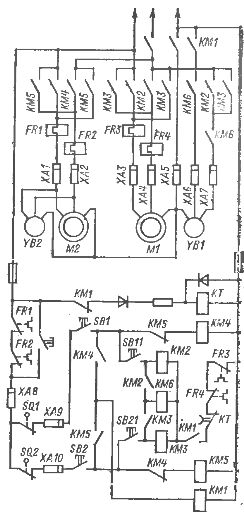
Sa fig. Ang 3 ay nagpapakita ng isang diagram ng isang electric drive para sa paggalaw ng isang overhead crane (trolley) sa tulong dalawang-bilis na squirrel-cage motor… Ang motor ay may dalawang magkahiwalay na windings na may pole ratio



Kasama sa SB1 o SB2 na button ang mga directional contactor na KM1, KM2 pati na rin ang low speed contactor na KM4. Matapos magbigay ng kapangyarihan sa mababang bilis ng paikot-ikot ng motor sa pamamagitan ng contactor KMZ, ang brake actuator na YB1, YB2 ay tumatanggap ng kapangyarihan.Para lumipat sa high speed, two-way na mga button, SB close contact SB11, SB21 (second position) at i-on ang contactor KM6.
Ang high-speed coil ay konektado sa grid sa pamamagitan ng isang risistor kasabay ng low-speed coil. Ang low speed coil ay naka-off. Matapos ang pagkaantala ng oras ng KT relay (2-5 s), ang contactor KM5 ay lumiliko at ang motor ay umabot sa natural na katangian nito ng high-speed mode (Larawan 2, b).
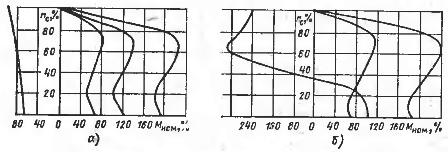
kanin. 2. Mga mekanikal na katangian ng mga diagram fig. 13
Kapag ang motor ay nakadiskonekta mula sa mains, ang brake actuator ay patuloy na tumatanggap ng kapangyarihan at nangyayari ang coasting. Maaaring ilapat ang electric braking kapag nagbabago mula sa mataas na bilis patungo sa mababang bilis. Para bitawan ang preno, pindutin lang ang SB3 button.
Kapag ang huling depensa ay na-trigger sa pamamagitan ng pagbubukas contactor ng linya sa panel ng proteksyon ang de-koryenteng motor ay naka-off at ang mekanikal na preno ay nakabukas. Ang mekanismo ay inhibited na may pinakamataas na intensity.
Dahil sa paggamit ng mga resistors sa circuit para sa high-speed windings, ang isang medyo malambot na pagsisimula ay ginanap sa ilalim ng kontrol ng time relay KT, ngunit ang braking torque ng low-speed winding ay hindi limitado, at sa kasong ito, malambot ang pagpepreno ay maaaring makamit sa pamamagitan ng ilang pulse switch ng SB1 o SB2 na buton.
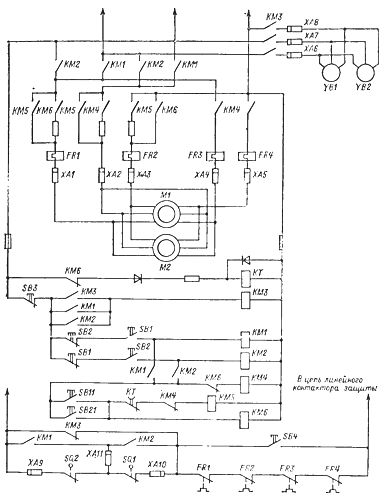
kanin. 3. Diagram ng electric drive (na may two-speed squirrel-cage motor) ng mekanismo ng paggalaw ng crane kapag pinaandar mula sa sahig: M1.M2 - electric motors, YB1, YB2 - brake drive, KM1, KM 12 - contactor para sa direksyon ng paglalakbay, KMZ - brake contactor, KM4 - low speed contactor, KM5 - high speed contactor, KM6 - resistor contactor sa stator circuit, FRI, FR2 , FR3 — thermal relay, KT — run control time relay, SQ1, SQ2 — limit switch, SB1, SB2 — travel direction buttons (bidirectional): SB11, SB21 — high speed buttons (second button position SB1, SB2), СВЗ — paglabas ng libreng stop button, SB4 — thermal protection bypass button, ХА1- ~ ХЛ11 — mga contact ng kasalukuyang transmission trolleys.
Sa fig. Ang 4 ay nagpapakita ng isang diagram ng mekanismo ng paglalakbay ng isang overhead crane gamit ang isang two-speed motor na walang libreng drain. Ang circuit ay naiiba mula sa isa na isinasaalang-alang ng sunud-sunod na pagsasama ng mga low-speed at high-speed windings at isang tiyak na limitasyon ng braking torque kapag ang windings ay konektado sa serye. Inirerekomenda ang scheme para sa mga overhead crane na tumatakbo sa labas.
Mga diagram ng koneksyon ng mga mekanismo ng pag-aangat ng mga crane
Sa fig. Ang 5 ay nagpapakita ng control circuit para sa isang electric hoist drive gamit ang isang two-speed squirrel-cage motor na may dalawang independent windings na may pole count ratio na 4/24 at 6/16. Ang circuit ay binuo sa prinsipyo ng double breaking mula sa dalawang independiyenteng mga aparato ng pangunahing circuit ng windings ng electric motor at ang mga circuit ng brake drive, na nagbibigay ng kinakailangang pagiging maaasahan ng hoist drive.
Ang low-speed winding ng electric motor ay tumatanggap ng kapangyarihan sa pamamagitan ng mga contact ng line contactor KM1, ang mga contact ng mga contactor ng direksyon na KM2, KMZ at ang nakakaabala na mga contact ng contactor KM4 pagkatapos pindutin ang kaukulang button SB1, SB2 (unang posisyon).
kanin. 4. Scheme ng electric drive (na may two-speed squirrel-cage motor) ng mekanismo ng paggalaw ng crane: M - electric motor, YB - brake drive, KM1, KM2 - contactors para sa direksyon ng paggalaw, KMZ - low-speed contactor, KM4 — high-speed contactor , KM5 — High Speed Resistor Contactor, CT — Start Time Control Relay, FR4 — Thermal Relay, SQ1, SQ2 — Limit Switch, SB1, SB2 — Mga Pindutan ng Direksyon sa Paglalakbay, SB11, SB21 — Mataas Mga Bilis na Pindutan, SB3 — Bypass Thermal Relay button, XA1 -XA10 — kasalukuyang mga contact sa paglilipat
Kapag pinindot ang pindutan ng SB11 (SB21), ang coil ng contactor KM4 ay tumatanggap ng kapangyarihan, lumilipat ito mula sa mababang bilis patungo sa mataas na bilis na may kaunting pagkagambala sa kuryente. Sa kasong ito, maaaring walang posisyon kapag ang high-speed at low-speed coils ay hindi pinagana. Ang paglipat mula sa isang low-speed winding sa isang high-speed winding ay isinasagawa sa ilalim ng kontrol ng time relay KT. Kapag ang proteksyon sa limitasyon ay naisaaktibo, ang mga windings ng motor at ang preno ay isinaaktibo nang dalawang beses.
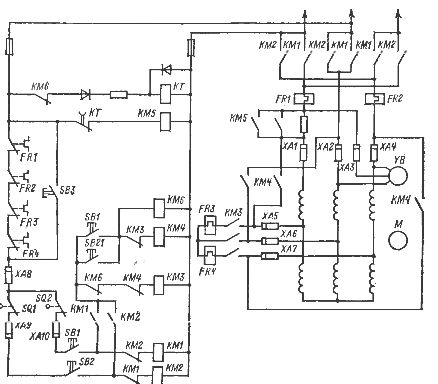
Sa fig. Ang 6 ay nagpapakita ng isang diagram ng electric drive ng mekanismo ng pag-aangat na may dalawang short-circuited electric motor na konektado sa isa't isa at sa gearbox sa pamamagitan ng planetary gear na may gear ratio na 6-8. Ang low-speed electric motor M2 ay naka-on sa buong oras ng pagpapatakbo ng mekanismo. Ang high-speed na motor ay nakikibahagi sa panahon ng high-speed na operasyon.Ang low-speed electric motor ay may built-in na preno.
kanin. 5. Scheme ng electric drive (na may dalawang-bilis na squirrel-cage motor) ng mekanismo ng pag-aangat kapag pinapatakbo mula sa sahig: M - electric motor, YB - brake coil, KM1 - lily contactor, KM2 - KMZ - directional contactors, KM4 — contactor para sa bilis ng paglipat, FR1 — FR3 — thermal relay, CT — acceleration control relay, SQ1, SQ2 — limit switch, SB1, SB2 — mga pindutan ng direksyon (two-way). SB3 — button para sa shunting thermal relays, SB11, SB21 — high-speed buttons (pangalawang posisyon ng mga button SB1, SB2), XA1 — XA10 — mga contact ng kasalukuyang mga transfer trolley.
kanin. 6. Scheme ng micromotor ng mekanismo ng pag-aangat kapag pinapatakbo mula sa sahig: M1 - high-speed electric motor, M2 - low-speed electric motor, YB1 - high-speed brake coil, YB2 - low-speed motor brake coil, KM1 - linear contactor, KM2 - KMZ - revolutions ng high directional contactors, KM4, KM5 - low speed contactor, KM6 - high speed brake contactor, KT - start time control relay, SQ1, SQ2 - limit switch, FR1 - FR4 - thermal relays, SB1, SB2 - mga two-way na direksyon na pindutan , SB11, SB21 — mga high-speed na button (pangalawang posisyon ng mga button SB1, SB2), XA1— XA10 — mga contact ng kasalukuyang mga transfer cart
Ang high-speed electric motor ay may hiwalay na preno na pinapatakbo ng electro-hydraulic thruster… Kapag pinindot ang pindutan ng direksyon na SB1 (SB2), ang contactor coil na KM4 (KM5) ay na-energize at ang low speed na motor ay naka-on. Kasabay nito, naka-on ang common line contactor na KM1.
Kapag ang pindutan ng SB1 (SB2) ay ganap na pinindot, ang mga contact na SB11 (SB21) ay sarado, ang coil ng contactor KM2 (KMZ) at KM6 ay pinalakas, ngunit pagkatapos ng mababang bilis ng oras ng pagsisimula sa ilalim ng kontrol ng Relay KT ay nag-expire. , naka-on ang high-speed na motor .
Kapag bumababa sa pag-akyat o pagbaba pagkatapos patayin ang high-speed na motor, ang pagpepreno sa mababang bilis ay ginagawa ng YB1 brake. Pagkatapos ng actuation ng limit switch SQ1 at SQ2, ang electric drive ay pinapatay na may double open circuit ng motor at brake drive.
Ang lahat ng inilarawan na mga scheme, alinsunod sa probisyon para sa pag-activate ng mga mekanismo ng kreyn kapag nagtatrabaho mula sa sahig, sa pamamagitan lamang ng patuloy na pagpindot sa pindutan. Kapag ang anumang uri ng proteksyon ay naka-off, ang mekanismo ay hihinto, anuman ang estado ng kontrol ng pindutan. aparato.
Ang itinuturing na mga scheme sa fig. 2-5 ay maaaring tipunin mula sa karaniwang mga magnetic starter type PMA, PML at time relay. Ang isang pagbubukod ay ang diagram sa fig. 2 kung saan ginagamit ang isang contactor upang ilipat ang mga rebolusyon dc contactor MK1-22, 40 A, 380 V, coil 220 V. Ayon sa ipinahiwatig na mga scheme, ang mga control panel para sa mga motor na may lakas na 0.8 hanggang 2 × 8.5 kW at mga control panel para sa pag-aangat ng mga motor na may lakas na 10 hanggang 22 kW ay naging binuo .