Kontrol ng motor bilang isang function ng kasalukuyang
 Maaaring gawin ang kontrol ng motor depende sa lakas ng kasalukuyang stator. Ang panimulang circuit bilang isang function ng kasalukuyang ng isang sugat-rotor induction motor ay ipinapakita sa Fig. 1 a.
Maaaring gawin ang kontrol ng motor depende sa lakas ng kasalukuyang stator. Ang panimulang circuit bilang isang function ng kasalukuyang ng isang sugat-rotor induction motor ay ipinapakita sa Fig. 1 a.
Sa sandali ng pagsisimula, ang kasalukuyang umabot sa halaga I1, at pagkatapos ng isang tiyak na agwat ng oras ay bumababa ito sa halaga I2 (fig. b). Sa puntong ito, ang bahagi ng panimulang paglaban sa rotor circuit ay awtomatikong short-circuited, ang kasalukuyang tumataas sa halaga I1, pagkatapos ay bumaba muli sa halaga I2, na nagiging sanhi ng isa pang bahagi ng panimulang paglaban sa maikli. Ang prosesong ito ay paulit-ulit hanggang ang lahat ng mga yugto ng panimulang paglaban ay mai-short-circuited. Para sa mga layuning ito, ginagamit ang isang overcurrent relay, ang mga windings na kung saan ay kasama sa power circuit ng motor.
Kapag nag-click ka sa button para sa pagsisimula SB1 (tingnan ang fig. A) ang contactor KM ay isinaaktibo, ang pangunahing mga contact kung saan ikinonekta ang motor sa network sa karaniwang panimulang paglaban sa rotor circuit. Sa kasong ito, ang coil ng KA relay ay tumatanggap ng kapangyarihan, ang pagbubukas ng mga contact na kung saan ay nasa circuit ng accelerator coil K1.Ang KA relay ay nakatakda upang ang oras ng pagtugon ay mas maikli kaysa sa K1 contactor. Bilang karagdagan, ang paglabag nito sa mga contact sa maximum na pinahihintulutang halaga panimulang kasalukuyang bukas, at kapag ang kasalukuyang bumababa sa halaga ng paglipat nito, isinara nila muli, dahil sa kung saan ang coil K1 ay naka-on sa pamamagitan ng mga contact ng relay KA sa sandali ng maikling circuit ng panimulang yugto ng paglaban.
Gumagana ang relay KA bago pasiglahin ang acceleration contactor K1, at ang motor ay bibilis kapag ang panimulang resistensya ay ganap na ipinakilala. Habang bumababa ang panimulang switching current, ang mga contact ng KA relay ay magsasara at ang coil K1 ay bubukas. Kasabay nito, ang contact K1 ay nagsasara, na nagbibigay ng self-powering ng coil nang nakapag-iisa sa relay KA, at ang contact sa control circuit ay bubukas, na pumipigil sa napaaga na pagsasama ng accelerator K2.
Dahil ang mga contact ng supply K1 ay bahagi ng maikling circuit ng panimulang paglaban, ang kasalukuyang stator ay tumataas sa pinakamataas na halaga at ang relay KA, kapag na-trigger, ay nagbubukas ng mga contact nito sa supply circuit ng coil K2. Kapag ang motor ay umabot sa sapat na bilis at ang stator current ay bumaba pabalik sa switching current, ang mga contact ng relay KA ay isasara at i-on ang coil K2, na nag-short-circuit sa ikalawang yugto ng panimulang paglaban sa mga contact nito.
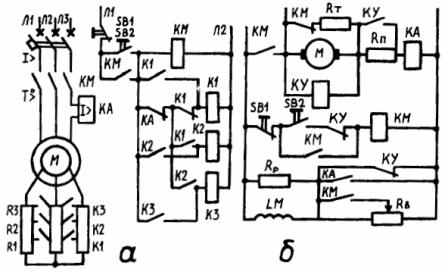
kanin. 1. Control circuits depende sa kasalukuyang: a — asynchronous motor na may phase rotor; b — DC motor na may parallel excitation
Sa kasong ito, ang kasalukuyang stator ay tumataas muli, ang KA relay ay gagana at magbubukas ng mga contact nito. Ang Coil K2 ay hindi mawawalan ng kapangyarihan dahil magkakaroon ito ng oras upang isara sa mga auxiliary contact na K2.Ang karagdagang pagbaba sa kasalukuyang stator pagkatapos ng susunod na acceleration ay magiging sanhi ng paikot-ikot na K3 upang i-on at short-circuit ang huling yugto ng panimulang paglaban. Ang pagpindot sa SB button ay huminto sa motor at ang circuit ay handa na para sa susunod na pagsisimula. Gamit ang kasalukuyang mga relay na naka-configure upang bumalik sa kasalukuyang 12, ang iba't ibang mga electric drive ay maaaring ihinto at baligtarin. Ang kawalan ng mga control circuit sa kasalukuyang function ay ang medyo malaking bilang ng mga contact.
Para sa hindi maibabalik na kontrol ng isang parallel-excited na DC motor ng ilang kilowatts, maaaring gamitin ang isang yugto ng panimulang rheostat (tingnan ang Fig. C). Ang diagram ay nagpapakita ng: kinokontrol ang paglaban ng RB sa circuit ng paggulo; discharge resistance Rp konektado sa parallel sa excitation coil LM; isang braking resistance RT konektado sa parallel sa armature M kapag nadiskonekta mula sa network at isang panimulang resistensya RP konektado sa serye sa armature circuit sa panahon ng pagsisimula. Upang makagawa ng maximum na pagkilos ng bagay sa pagsisimula, ang LM field coil sa paunang posisyon ay naka-on sa buong boltahe.
Kapag pinindot ang SB2 button, ang armature ng motor mula sa line contactor KM ay konektado sa serye sa network na may resistance RP. Ang starter control relay na SC ay gumagana bilang isang function ng armature current. Habang tumataas ang kasalukuyang, ang pagsasara ng kontak ng KA ay nagmamanipula sa resistensya ng RB, pinatataas ang paggulo magnetic flux, at habang bumababa ang kasalukuyang, ang contact ng KA ay bubukas at ang LM coil ay konektado sa serye na may paglaban ng rheostat RB, dahil sa na bumababa ang magnetic current.
Kapag sinimulan ang motor, ang tumaas na panimulang armature current ay i-on ang KA relay at ang LM coil ay lumilikha ng maximum na pagkilos ng bagay. Kapag naabot ang isang tiyak na bilis, ang acceleration contactor K ay naka-on, ang panimulang paglaban ng RP ay short-circuited, pagkatapos kung saan ang motor ay nagpapatakbo ayon sa mga likas na katangian nito. Kapag bumaba ang armature current (bilang resulta ng motor acceleration) bago ang KA relay ay nag-energize, ang KA contact sa excitation circuit ay magbubukas.
Ang LM winding ay mag-o-on sa serye na may RB resistance, na nagiging sanhi ng field flux na humina at ang armature current ay tumaas nang naaayon. Ang KA relay ay gagana muli, ang pagtaas ng pagkilos ng bagay at sabay-sabay na pagtaas ng bilis ng motor. Sa panahon ng pagsisimula, ang spacecraft relay ay na-trigger nang ilang beses hanggang sa maabot ng motor ang bilis na itinakda ng RB control rheostat. Ang naturang vibrating device na tumatakbo bilang kasalukuyang function ay pinapasimple ang circuit kumpara sa control circuits bilang isang function ng oras.
Kapag ang motor ay naka-on sa pamamagitan ng pagpindot sa SB1 button, ang armature ay naka-on mula sa pambungad na contact KM sa braking resistor RT at ang dynamic na pagpepreno ay awtomatikong ginagawa. Sa simula ng paghinto, ang magnetic field ay bahagyang humina dahil sa pagbubukas ng KM contact sa slider ng regulating rheostat, at ang excitation current ay dumadaan sa buong resistance RB. Habang ang bilis ng motor ay lalong bumababa, ang acceleration contactor K ay de-energized at ang flux ay tumataas habang ang excitation coil ay inililipat sa buong boltahe ng linya sa pamamagitan ng pambungad na contact K, na nagreresulta sa pagtaas ng braking torque.