Mga awtomatikong control circuit para sa pagsisimula at paghinto ng mga DC motor
 Ang pagsisimula ng anumang engine ay sinamahan ng ilang mga switch sa power circuit at control circuit. Sa kasong ito, ginagamit ang mga relay-contactor at non-contact na device. Para malimitahan ang DC motors panimulang agos Ang mga panimulang resistor ay kasama sa rotor at armature circuit ng mga motor, na pinapatay kapag ang mga motor ay pinabilis sa mga hakbang. Kapag kumpleto na ang startup, ang mga startup resistors ay ganap na na-bypass.
Ang pagsisimula ng anumang engine ay sinamahan ng ilang mga switch sa power circuit at control circuit. Sa kasong ito, ginagamit ang mga relay-contactor at non-contact na device. Para malimitahan ang DC motors panimulang agos Ang mga panimulang resistor ay kasama sa rotor at armature circuit ng mga motor, na pinapatay kapag ang mga motor ay pinabilis sa mga hakbang. Kapag kumpleto na ang startup, ang mga startup resistors ay ganap na na-bypass.
Ang proseso ng pagpepreno ng mga motor ay maaari ding awtomatiko. Pagkatapos ng stop command, sa tulong ng relay-contactor equipment, ang mga kinakailangang switch ay ginawa sa mga power circuit. Kapag papalapit sa isang bilis na malapit sa zero, ang motor ay naka-disconnect mula sa network. Sa panahon ng pagsisimula, ang mga hakbang ay naka-off sa mga regular na pagitan o depende sa iba pang mga parameter. Binabago nito ang kasalukuyang at bilis ng motor.
Ang kontrol sa pagsisimula ng motor ay ginagawa bilang isang function ng EMF (o bilis), kasalukuyang, oras, at landas.
Karaniwang mga subassemblies at circuit para sa awtomatikong kontrol ng pagsisimula ng mga DC motor
Ang pagsisimula ng isang DC motor na may parallel o independiyenteng paggulo ay ginagawa gamit ang isang risistor na ipinakilala sa armature circuit. Ang isang risistor ay kinakailangan upang limitahan ang inrush na kasalukuyang. Habang bumibilis ang motor, ang panimulang risistor ay inihakbang. Kapag kumpleto na ang pagsisimula, ang risistor ay ganap na malalampasan at ang motor ay babalik sa mga natural na mekanikal na katangian nito (Larawan 1). Sa pagsisimula, ang makina ay nagpapabilis ayon sa artipisyal na katangian 1, pagkatapos ay 2, at pagkatapos na i-maneuver ang risistor - ayon sa natural na katangian 3.
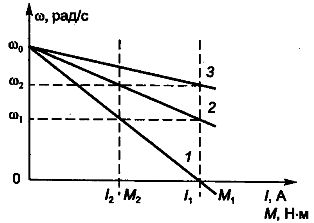
kanin. 1. Mechanical at electromechanical na katangian ng isang DC motor na may parallel excitation (ω — angular speed of rotation; I1 M1 — peak current at torque ng motor; I2 M2 — current and switching moment)
Isaalang-alang ang panimulang circuit node ng DC motor (DCM) sa EMF function (Fig. 2).
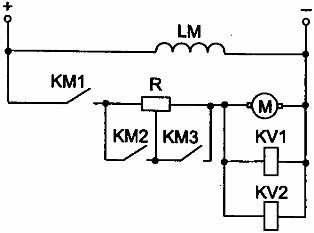
kanin. 2. Ang panimulang circuit node ng DCT ng parallel excitation sa EMF function
Ang function ng EMF (o bilis) ay kinokontrol ng mga relay, boltahe at contactor. Ang mga relay ng boltahe ay naka-configure upang gumana sa iba't ibang halaga ng armature emf. Kapag ang contactor KM1 ay naka-on, ang boltahe ng KV relay sa oras ng pagsisimula ay hindi sapat para sa operasyon. Kapag bumibilis ang motor (dahil sa pagtaas ng emf ng motor), ang KV1 relay ay isinaaktibo, pagkatapos ay KV2 (ang mga relay activation voltages ay may kaukulang mga halaga); kasama nila ang mga acceleration contactor na KM2, KMZ, at ang mga resistors sa armature circuit ay shunted (contactor switching circuits ay hindi ipinapakita sa diagram; LM ay ang excitation winding).
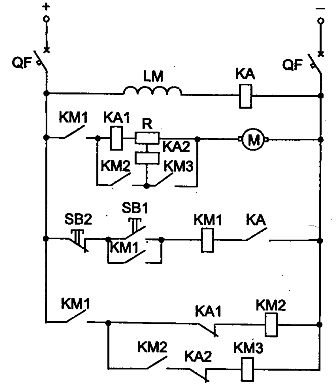
Tingnan natin ang scheme para sa pagsisimula ng isang DC motor sa EMF function (Larawan 3). Ang angular velocity ng motor ay madalas na naayos nang hindi direkta, i.e.pagsukat ng mga dami na may kaugnayan sa bilis. Para sa isang DC motor, ang naturang halaga ay ang EMF. Ang pagsisimula ay isinasagawa bilang mga sumusunod. Ang QF circuit breaker ay naka-on, ang motor field ay konektado sa power supply. Ina-activate at isinasara ng KA relay ang contact nito.
Ang natitirang mga aparato ng circuit ay nananatili sa kanilang orihinal na posisyon. Upang simulan ang makina, kailangan mo pindutin ang pindutan SB1 «Start», pagkatapos kung saan ang contactor KM1 ay isinaaktibo at ikinokonekta ang motor sa pinagmumulan ng kuryente. Ang contactor KM1 ay self-powered. Ang DC motor ay pinabilis gamit ang motor armature circuit resistor R.
Habang tumataas ang bilis ng motor, tumataas ang emf nito at ang boltahe sa mga coils ng mga relay na KV1 at KV2. Sa bilis na ω1 (tingnan ang Fig. 1.) ang relay KV1 ay isinaaktibo. Isinasara nito ang contact nito sa contactor circuit KM2, na kung saan trip at short-circuits ang unang yugto ng panimulang risistor sa contact nito. Sa bilis ω2 relay KV2 ay energized. Sa pamamagitan ng pakikipag-ugnay nito, isinasara nito ang supply circuit ng KMZ contactor, na, kapag kumilos, na may isang contact, short-circuits ang pangalawang panimulang yugto ng panimulang risistor. Naabot ng makina ang mga natural na mekanikal na katangian nito at tinatapos ang pag-alis.
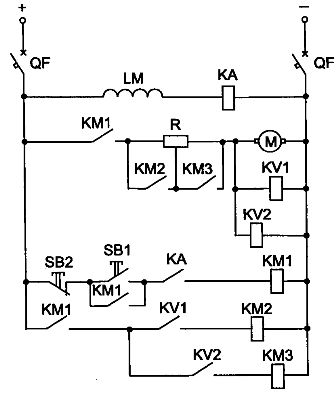
kanin. 3. Schematic ng pagsisimula ng DCT ng parallel excitation sa EMF function
Para sa tamang operasyon ng circuit, kinakailangan upang itakda ang boltahe relay KV1 upang gumana sa EMF naaayon sa bilis ω1 at ang relay KV2 upang gumana sa bilis ω2.
Upang ihinto ang makina, pindutin ang Stop button SB2. Para idiskonekta ang electrical circuit, buksan ang QF circuit breaker.
Ang kasalukuyang function ay kinokontrol ng isang kasalukuyang relay. Isaalang-alang ang dc motor starter circuit node sa flux function. Sa diagram na ipinapakita sa fig.4, ang mga overcurrent relay ay ginagamit, na kumukuha sa inrush kasalukuyang I1 at bumaba sa pinakamababang kasalukuyang I2 (tingnan ang Fig. 1). Ang panloob na oras ng pagtugon ng kasalukuyang mga relay ay dapat na mas mababa kaysa sa oras ng pagtugon ng contactor.
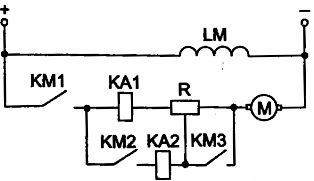
kanin. 4. Ang panimulang circuit node ng parallel excitation DCT depende sa kasalukuyang
Ang pagpabilis ng motor ay nagsisimula sa ganap na ipinasok ng risistor sa armature circuit. Habang bumibilis ang makina, bumababa ang kasalukuyang, kasama ang kasalukuyang I2, nawawala ang relay KA1 at sa pamamagitan ng contact nito ay isinasara ang supply circuit ng contactor KM2, na lumalampas sa unang contact ng panimulang risistor kasama ang contact nito. Katulad nito, ang pangalawang panimulang yugto ng risistor ay short-circuited (relay KA2, contactor KMZ). Ang mga contactor power circuit ay hindi ipinapakita sa diagram. Sa pagtatapos ng pagsisimula ng motor, ang risistor sa armature circuit ay mai-bridge.
Isaalang-alang ang circuit para sa pagsisimula ng isang DC motor bilang isang flux function (Larawan 5). Ang mga resistensya ng mga hakbang ng risistor ay pinili upang sa sandaling ang motor ay naka-on at ang mga hakbang ay shunted, ang kasalukuyang I1 sa armature circuit at ang sandaling M1 ay hindi lalampas sa pinahihintulutang antas.
Pagsisimula ng isang DC motor ay ginagawa sa pamamagitan ng pag-on sa QF circuit breaker at pagpindot sa «Start» button na SB1. Sa kasong ito, ang contactor KM1 ay isinaaktibo at isinasara ang mga contact nito. Ang inrush kasalukuyang I1 ay dumadaan sa power circuit ng motor, sa ilalim ng impluwensya kung saan ang overcurrent relay KA1 ay isinaaktibo. Ang contact nito ay bubukas at ang contactor KM2 ay hindi tumatanggap ng kapangyarihan.
kanin. 5. Schematic ng parallel excitation DCT start-up bilang isang function ng kasalukuyang
Kapag ang kasalukuyang ay bumaba sa pinakamababang halaga I2, ang overcurrent na relay na KA1 ay bumaba at isinara ang contact nito.Ang contactor KM2 ay isinaaktibo at sa pamamagitan ng pangunahing contact nito ay pinalilipat ang unang seksyon ng panimulang risistor at relay na KA1. Kapag lumilipat, ang kasalukuyang tumataas sa halaga I1.
Kapag ang kasalukuyang tumaas muli sa halaga ng I1, ang contactor KM1 ay hindi naka-on, dahil ang coil nito ay na-bypass ng contact KM2. Sa ilalim ng impluwensya ng kasalukuyang I1, ang relay KA2 ay isinaaktibo at binubuksan ang contact nito. Kapag nasa proseso ng acceleration ang kasalukuyang bumababa muli sa halaga ng I2, ang relay KA2 ay bumaba at ang contactor KMZ ay naka-on. Ang pagsisimula ay kumpleto, ang makina ay nagpapatakbo kasama ang mga likas na katangian ng mekanikal nito.
Para sa tamang paggana ng circuit, kinakailangan na ang oras ng pagtugon ng relay KA1 at KA2 ay mas mababa kaysa sa oras ng pagtugon ng mga contactor. Upang ihinto ang motor, pindutin ang pindutan ng «Stop» SB2 at patayin ang QF circuit breaker upang idiskonekta ang circuit.
Ang kontrol sa oras ay nagagawa gamit ang isang time relay at kaukulang mga contactor na nag-short-circuit sa mga yugto ng risistor sa kanilang mga contact.
Isaalang-alang ang panimulang circuit node DC motor bilang isang function ng oras (Larawan 6) Ang time relay na KT ay agad na isinaaktibo kapag lumitaw ang boltahe sa control circuit sa pamamagitan ng pambungad na contact na KM1. Pagkatapos buksan ang contact KM1, mawawalan ng power supply ang time relay na KT at isasara ang contact nito nang may time delay. Contactor KM2 pagkatapos ng agwat ng oras na katumbas ng oras ng pagkaantala ng oras na relay ay tumatanggap ng kapangyarihan, isinasara ang contact nito at binabawasan ang paglaban sa armature circuit.
kanin. 6. Ang DCT starting circuit node ng parallel excitation bilang isang function ng oras
Ang mga bentahe ng kontrol sa pag-andar ng oras ay kinabibilangan ng kadalian ng kontrol, katatagan ng proseso ng acceleration at deceleration, kakulangan ng pagkaantala ng electric drive sa mga intermediate na bilis.
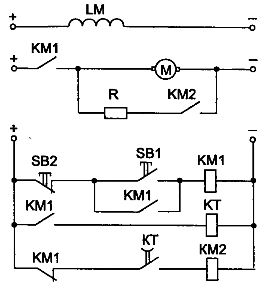
Isaalang-alang ang circuit para sa pagsisimula ng DC motor parallel excitation bilang isang function ng oras. Sa fig. Ang 7 ay nagpapakita ng isang diagram ng isang hindi maibabalik na simula DC parallel excitation motor. Ang paglulunsad ay nagaganap sa dalawang yugto. Ang circuit ay gumagamit ng mga pindutan SB1 «Start» at SB2 «Stop», contactors KM1 ... KMZ, electromagnetic time relays KT1, KT2. Ang QF breaker ay naka-on. Sa kasong ito, ang coil ng time relay KT1 ay tumatanggap ng kapangyarihan at binubuksan ang contact nito sa circuit ng contactor KM2. Sinisimulan ang makina sa pamamagitan ng pagpindot sa pindutang «Start» SB1. Ang contactor KM1 ay tumatanggap ng kapangyarihan at kasama ang pangunahing contact nito ay nag-uugnay sa motor sa isang pinagmumulan ng kapangyarihan na may isang risistor sa armature circuit.
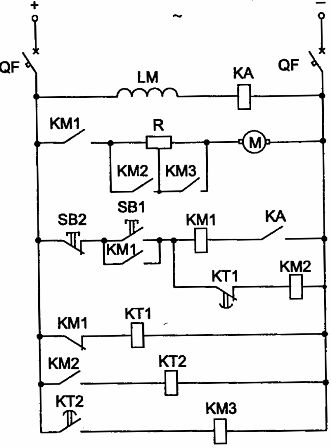
kanin. 7. Schematic ng hindi maibabalik na pagsisimula ng isang DC motor bilang isang function ng oras
Ang undercurrent relay KA ay nagsisilbing protektahan ang motor mula sa pagkagambala ng excitation circuit. Sa panahon ng normal na operasyon, ang KA relay ay nagpapasigla at ang contact nito sa KM1 contactor circuit ay nagsasara, na inihahanda ang KM1 contactor para sa operasyon. Kapag nasira ang excitation circuit, ang KA relay ay naka-off, nagbubukas ng contact nito, pagkatapos ay ang KM1 contactor ay naka-off at ang engine ay huminto. Kapag ang contactor KM1 ay pinaandar, ang blocking contact nito ay nagsasara at ang contact KM1 sa relay circuit na KT1 ay bubukas, na nag-o-off at nagsasara ng contact nito nang may pagkaantala ng oras.
Pagkatapos ng agwat ng oras na katumbas ng oras ng pagkaantala ng relay KT1, ang supply circuit ng accelerating contactor KM2 ay sarado, na na-trigger at kasama ang pangunahing contact short-circuit nito sa isang yugto ng panimulang risistor. Kasabay nito, ang relay ng oras na KT2 ay pinalakas. Bumibilis ang makina. Pagkatapos ng agwat ng oras na katumbas ng pagkaantala ng KT2 relay, ang KT2 contact ay nagsasara, ang KMZ acceleration contactor ay isinaaktibo at kasama ang pangunahing contact nito sa ikalawang yugto ng panimulang risistor sa armature circuit. Ang pagsisimula ay kumpleto at ang makina ay bumalik sa mga likas na mekanikal na katangian nito.
Karaniwang DC brake control circuit unit
Gumagamit ang mga awtomatikong control system ng DC motor ng dynamic na pagpepreno, kabaligtaran ng pagpepreno at regenerative braking.
Sa dynamic na pagpepreno, kinakailangan upang isara ang armature winding ng motor sa isang karagdagang pagtutol at iwanan ang paggulo winding energized. Ang pagpepreno na ito ay maaaring gawin bilang isang function ng bilis at bilang isang function ng oras.
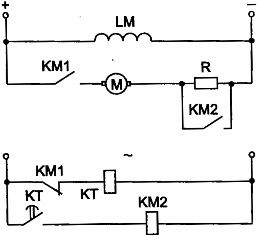
Ang kontrol bilang isang function ng bilis (EMF) sa panahon ng dynamic na pagpepreno ay maaaring gawin ayon sa scheme na ipinapakita sa fig. 8. Kapag ang KM1 contactor ay naka-off, ang motor armature ay na-disconnect mula sa mains, ngunit may boltahe sa mga terminal nito sa sandali ng pag-disconnect. Ang boltahe relay KV ay nagpapatakbo at isinasara ang contact nito sa circuit ng contactor KM2, na kasama ng contact nito ay isinasara ang armature ng motor sa risistor R.
Sa bilis na malapit sa zero, nawawalan ng kuryente ang KV relay. Ang karagdagang pagbabawas mula sa pinakamababang bilis hanggang sa ganap na paghinto ay nangyayari sa ilalim ng pagkilos ng isang static na sandali ng pagtutol.Upang madagdagan ang kahusayan sa pagpepreno, maaaring ilapat ang dalawa o tatlong yugto ng pagpepreno.
kanin. 8. Node ng circuit para sa awtomatikong kontrol ng dynamic na pagpepreno sa EMF function: a - power circuit; b - control circuit
Ang dynamic na pagpepreno pare-pareho ang motor independent excitation bilang isang function ng oras ay isinasagawa ayon sa scheme na ipinapakita sa fig. siyam.
kanin. 9. Node ng DCT dynamic braking circuit ng independent excitation bilang isang function ng oras
Kapag tumatakbo ang makina, naka-on ang time relay KT, ngunit bukas ang circuit ng brake contactor KM2. Upang huminto, dapat mong pindutin ang "Stop" na buton SB2. Contactor KM1 at time relay KT mawalan ng kapangyarihan; ang contactor KM2 ay isinaaktibo dahil ang contact KM1 sa circuit ng contactor KM2 ay nagsasara at ang contact ng time relay na KT ay bubukas na may time delay.
Para sa timing ng time relay, ang contactor KM2 ay tumatanggap ng kapangyarihan, isinasara ang contact nito at ikinokonekta ang motor armature sa karagdagang risistor R. Ang isang dynamic na paghinto ng motor ay ginanap. Sa pagtatapos nito, ang KT relay, pagkaraan ng ilang oras, ay nagbubukas ng contact nito at dinidiskonekta ang KM2 contactor mula sa network. Ang karagdagang pagpepreno hanggang sa kumpletong paghinto ay isinasagawa sa ilalim ng impluwensya ng sandali ng paglaban Ms.
Sa reverse action braking, ang motor EMF at ang mains voltage ay kumikilos alinsunod. Upang limitahan ang kasalukuyang, isang risistor ay ipinasok sa circuit.
Kontrol ng paggulo ng mga DC motor
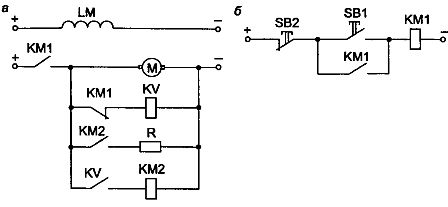
Ang field winding ng motor ay may makabuluhang inductance at kung ang motor ay mabilis na pinatay, ang isang malaking boltahe ay maaaring lumitaw dito, na magiging sanhi ng pagkakabukod ng winding upang masira. Upang maiwasan ito, maaari mong gamitin ang mga circuit node na ipinapakita sa fig.10. Ang extinguishing resistance ay naka-on kahanay sa excitation coil sa pamamagitan ng diode (Fig. 10, b). Samakatuwid, pagkatapos na patayin, ang kasalukuyang ay dumadaan sa paglaban sa maikling panahon (Larawan 10, a).

kanin. 10. Mga node ng mga circuit para sa paglipat sa pagsusubo resistances: a - pagsusubo pagtutol ay konektado sa parallel; b - ang pagsusubo ng pagtutol ay inililipat sa pamamagitan ng diode.
Ang proteksyon laban sa pagkagambala ng circuit ng paggulo ay isinasagawa gamit ang isang undercurrent relay ayon sa scheme na ipinapakita sa fig. labing-isa.

kanin. 11. Proteksyon laban sa pagkagambala ng circuit ng paggulo: a — circuit ng paggulo ng kuryente; b - control circuit
Sa kaganapan ng isang break sa paggulo coil, ang relay KA de-energizes at disconnects ang circuit ng contactor KM.