Baliktarin at itigil ang induction motor ng squirrel-cage
Ang induction motor ay isang reversible machine. Upang baguhin ang direksyon ng pag-ikot ng rotor, kinakailangang baguhin ang direksyon ng pag-ikot ng magnetic field (sa pamamagitan ng paglipat ng mga supply wire sa mga terminal ng dalawang phase ng motor) - Pagsisimula ng makina at mga circuit ng preno
Ang mga mekanikal na katangian para sa dalawang direksyon ng pag-ikot ay ipinapakita sa Fig. 1.
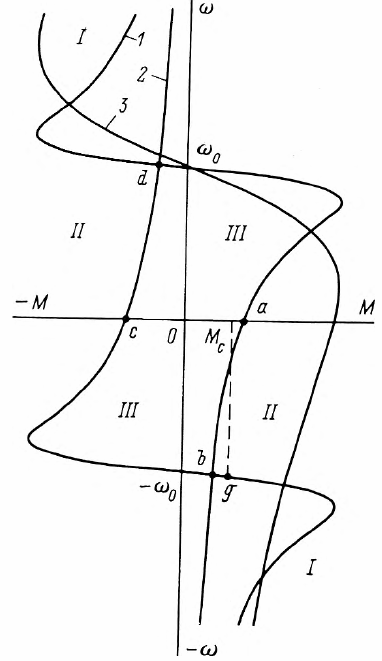
kanin. 1. Pamilya ng mga mekanikal na katangian ng isang induction motor para sa nababaligtad na operasyon sa stop mode na may supply ng enerhiya sa network (I), mode ng oposisyon (II) at motor (III) 1, 2 - natural; 3 - artipisyal.
Ang isang squirrel cage induction motor ay maaaring gamitin hindi lamang bilang isang motor kundi pati na rin bilang isang preno. Sa stop mode, ang bawat de-koryenteng motor ay palaging gumagana bilang isang generator. Sa kasong ito, ang isang induction electric motor na may squirrel-cage rotor ay maaaring magkaroon ng tatlong braking mode.
Sa regenerative braking mode, ang makina ay gumagana nang may negatibong slip. Sa kasong ito, ang bilis ng rotor ay lumampas sa bilis ng pag-ikot ng magnetic field.Siyempre, upang lumipat sa mode na ito, ang isang panlabas na aktibong sandali ay dapat ilapat sa gilid ng baras.
Ang feed-back mode ay malawakang ginagamit sa lifting installation. Sa panahon ng pagbaba, ang propulsion system, dahil sa potensyal na enerhiya ng load, ay maaaring makakuha ng isang bilis na lumampas sa bilis ng pag-ikot ng magnetic field, at ang pagbaba ay magaganap sa isang estado ng balanse na naaayon sa isang tiyak na punto g sa mekanikal na katangian. , kapag ang static na sandali na nilikha ng pababang load, ay balanse ng engine braking torque.
Sa mga maginoo na drive na may reaktibo na static na metalikang kuwintas, ang mode na pinag-uusapan ay ipinatupad lamang sa pamamagitan ng mga espesyal na control circuit, na ginagawang posible na bawasan ang bilis ng pag-ikot ng magnetic field. Ang mga mekanikal na katangian ng isang induction machine para sa feed-back mode ay ipinapakita sa parehong figure. 1.
Tulad ng ipinapakita, ang maximum na metalikang kuwintas sa generator mode ay bahagyang mas mataas kaysa sa motor mode, at ang kritikal na slip sa ganap na halaga ay pareho.
Ang mga asynchronous na generator ay may napakakitid na saklaw, ibig sabihin wind power plants... Dahil ang lakas ng hangin ay hindi pare-pareho at, nang naaayon, ang bilis ng pag-ikot ng aparato ay nagbabago nang malaki, ang isang asynchronous na generator ay mas kanais-nais sa ilalim ng mga kondisyong ito.
Ang pinaka-tinatanggap na ginagamit ay ang braking mode - pagsalungat. Ang paglipat sa mode na ito ng mga asynchronous na motor, pati na rin ang mga DC motor, ay posible sa dalawang kaso (Larawan 1): na may isang makabuluhang pagtaas sa static na metalikang kuwintas (seksyon ab) o kapag inililipat ang stator winding para sa ibang direksyon ng pag-ikot ( cd ng seksyon).
Sa parehong mga kaso, ang motor ay nagpapatakbo na may slip na mas malaki sa 1 hanggang sa lumampas ang mga alon sa mga panimulang alon. Samakatuwid, para sa isang squirrel-cage motor, ang mode na ito ay magagamit lamang upang mabilis na ihinto ang drive.
Kapag naabot ang zero speed, ang motor ay dapat na idiskonekta mula sa mains, kung hindi, ito ay may posibilidad na mapabilis sa kabaligtaran na direksyon.
Kapag nagpepreno sa pamamagitan ng magkasalungat na mga motor na rotor ng sugat, ang isang resistensya ng rheostat ay dapat ipasok sa rotor circuit upang limitahan ang kasalukuyang at mapataas ang braking torque.
Pwede rin naman dynamic na mode ng pagpepreno… Gayunpaman, nagdudulot ito ng ilang kahirapan. Kapag nadiskonekta ang motor sa mains, nawawala rin ang magnetic field ng makina. Posibleng pukawin ang isang induction machine mula sa isang direktang kasalukuyang pinagmumulan na konektado sa isang stator na nakadiskonekta mula sa alternating kasalukuyang network. Ang pinagmulan ay dapat magbigay ng isang kasalukuyang sa stator paikot-ikot na malapit sa nominal. Dahil ang kasalukuyang ito ay limitado lamang sa pamamagitan ng electrical resistance ng coil, ang DC source boltahe ay dapat na mababa (karaniwang 10 — 12 V).
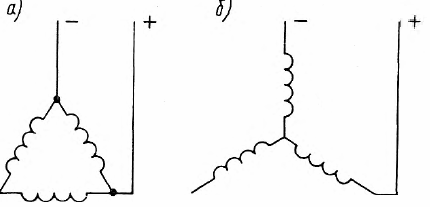
kanin. 2. Pagkonekta sa stator ng isang induction motor sa isang DC source sa dynamic braking mode kapag nakakonekta sa delta (a) at star (b)
Ginagamit din ang self-excitation para sa dynamic na pagpepreno. Ang mga capacitor ay konektado sa stator na naka-disconnect mula sa mains.
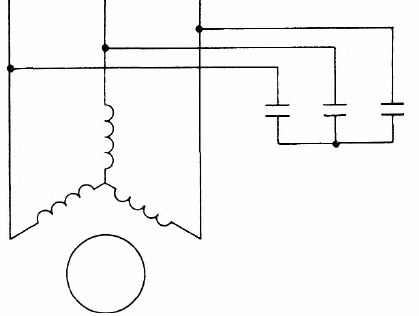
kanin. 3. Schematic ng dynamic na pagpepreno ng isang self-excited induction motor
Habang umiikot ang rotor, ang isang EMF ay nilikha sa stator circuit dahil sa natitirang magnetization at kasalukuyang daloy sa pamamagitan ng stator windings pati na rin sa pamamagitan ng mga capacitor.Kapag ang isang tiyak na bilis ay naabot sa stator circuit, magaganap ang mga resonant na kondisyon: ang kabuuan ng mga inductive resistance ay katumbas ng capacitive resistance. Magsisimula ang isang masinsinang proseso ng self-excitation ng makina, na hahantong sa pagtaas ng EMF. Ang self-excitation mode ay magtatapos kapag ang EMF ng makina E at ang pagbaba ng boltahe sa mga capacitor ay pantay.
Ang maximum na metalikang kuwintas ng pagpepreno na may pagtaas ng kapasidad ay lumilipat sa mas mababang bilis. Ang mga kawalan ng itinuturing na mode ng pagpepreno ay ang hitsura ng pagkilos ng pagpepreno sa loob lamang ng isang tiyak na zone ng bilis at ang pangangailangan na gumamit ng malalaking capacitor para sa pagpepreno sa mababang bilis.
Sa kalamangan, walang karagdagang mapagkukunan ng kuryente ang kinakailangan. Ang mode na ito ay palaging ipinapatupad sa mga pag-install kung saan ang isang capacitor bank ay konektado sa motor upang mapabuti ang power factor ng supply network.
Tingnan din ang paksang ito: Mga circuit ng preno para sa mga asynchronous na motor