Dynamic na pagpepreno ng makina
 Ginagamit ang dynamic na pagpepreno upang mabilis at tumpak na ihinto ang makina. Mayroong diagram ng dynamic na pagpepreno ng makina na may paglalarawan ng operasyon dito… Sa parehong artikulo, isasaalang-alang natin ang mga pisikal na proseso na nagaganap sa panahon ng dynamic na pagpepreno ng squirrel-cage at phase-rotor induction motors.
Ginagamit ang dynamic na pagpepreno upang mabilis at tumpak na ihinto ang makina. Mayroong diagram ng dynamic na pagpepreno ng makina na may paglalarawan ng operasyon dito… Sa parehong artikulo, isasaalang-alang natin ang mga pisikal na proseso na nagaganap sa panahon ng dynamic na pagpepreno ng squirrel-cage at phase-rotor induction motors.
Ang dynamic na pagpepreno ng squirrel-cage rotor ay nangyayari pagkatapos na idiskonekta ang stator winding mula sa mains. Humihinto ang motor pagkatapos maikonekta ang coil sa supply ng DC.
Ang mga direktang alon sa mga yugto ng paikot-ikot na stator ay nagdudulot ng kaukulang EMF, na nagpapasigla sa isang nakatigil na magnetic field sa motor. Ito ay nag-uudyok ng alternating emf at mga agos ng pagbaba ng dalas sa mga paikot-ikot na yugto ng isang umiikot na rotor. Samakatuwid, ang induction motor ay napupunta sa alternator mode na may mga nakapirming magnetic pole. Sa mode na ito, binago ng motor ang kinetic energy ng mga link ng mekanismo ng produksyon na gumagalaw at umiikot sa pamamagitan ng inertia sa elektrikal na enerhiya, na na-convert sa thermal energy sa rotor winding circuit.
Ang pakikipag-ugnayan ng magnetic field na nasasabik ng magnetomotive force ng stator winding na may kasalukuyang sa mga phase ng rotor winding ay nagiging sanhi ng hitsura ng braking torque sa ilalim ng impluwensya kung saan huminto ang motor rotor.
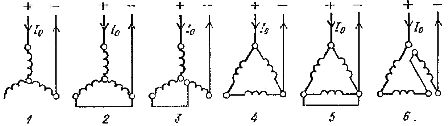
kanin. 1. Mga scheme para sa paglipat sa mga phase ng stator winding ng isang three-phase asynchronous motor para sa pare-pareho ang boltahe sa panahon ng dynamic na pagpepreno
Ang magnitude ng sandali ng pagpepreno ay nakasalalay sa halaga ng magnetomotive force ng stator winding, ang halaga ng aktibong paglaban ng mga adjustable resistors ng rotor winding circuit at ang bilis nito. Upang makamit ang kasiya-siyang pagpepreno, ang DC current ay dapat na 4-5 beses ang no-load current ng induction motor.

Ang mga mekanikal na katangian ng isang induction machine sa panahon ng dynamic na pagpepreno ay dumadaan sa pinanggalingan, dahil walang braking torque sa maagang zero speed. Ang halaga ng maximum na sandali ng pagpepreno ay tumataas sa pagtaas ng direktang kasalukuyang, ngunit hindi ito nakasalalay sa halaga ng mga aktibong resistensya ng mga adjustable na resistors na ipinakilala sa circuit ng rotor winding, na tumutukoy sa bilis nito, kung saan umabot ang metalikang kuwintas. ang halaga Mt = MlyulkaG... Sa isang naibigay na sandali ng pagpepreno Mt pagtaas ng aktibong paglaban ng mga resistors Rd ay humahantong sa isang pagtaas sa bilis ng rotor.
Ang dinamikong pagpepreno ng mga asynchronous na motor ay medyo matipid at magagawa kapwa sa mga bilis na mas mababa kaysa sa kasabay na bilis at sa mga bilis na lumalampas dito (Larawan 2).
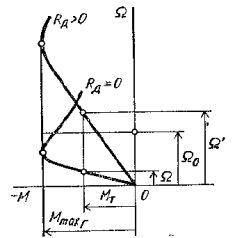
kanin. 2. Mga mekanikal na katangian ng isang three-phase wound-rotor induction motor sa ilalim ng dynamic na pagpepreno
Para sa mga three-phase asynchronous na motor na may rotor na squirrel-cage, madalas ding ginagamit ang capacitor braking, kung saan ang isang simetriko na three-phase capacitor bank ay konektado sa mga terminal ng stator winding, na, pagkatapos na idiskonekta ang makina mula sa mains at ang rotor umiikot sa pamamagitan ng pagkawalang-galaw, excites isang tatlong-phase simetriko boltahe sistema sa stator paikot-ikot. Dahil sa paglipat ng makina sa generator mode, nangyayari ang isang sandali ng pagpepreno, na binabawasan ang bilis ng rotor ng motor. Magbasa pa tungkol dito: Capacitor braking ng mga asynchronous na motor