Pagpili ng mga motor para sa mga elevator at lifting machine sa pamamagitan ng kapangyarihan
 Ang mga modernong elevator ng pasahero at kargamento ng mga gusali ng tirahan at administratibo, pati na rin ang ilang mga makina para sa pag-aangat ng mga mina, ay ginagawa gamit ang isang counterweight o, kung minsan ay tinatawag itong, na may isang counterweight. Sa makinarya ng pagmimina, ang pagbabalanse, tulad ng nabanggit na, ay kadalasang ginagawa hindi sa pamamagitan ng counterweight, ngunit sa pamamagitan ng pangalawang lifting vessel.
Ang mga modernong elevator ng pasahero at kargamento ng mga gusali ng tirahan at administratibo, pati na rin ang ilang mga makina para sa pag-aangat ng mga mina, ay ginagawa gamit ang isang counterweight o, kung minsan ay tinatawag itong, na may isang counterweight. Sa makinarya ng pagmimina, ang pagbabalanse, tulad ng nabanggit na, ay kadalasang ginagawa hindi sa pamamagitan ng counterweight, ngunit sa pamamagitan ng pangalawang lifting vessel.
Ang counterweight para sa mga elevator ay pinili upang balansehin ang bigat ng lifting vessel (kotse) at bahagi ng nominal load na iaangat:

kung saan ang GH ay ang bigat ng nominal lifting load, N; G0 - timbang ng cabin, N; Ang Gnp ay ang bigat ng counterweight, N; Ang α ay ang balanseng factor, kadalasang kinukuha na katumbas ng 0.4-0.6.
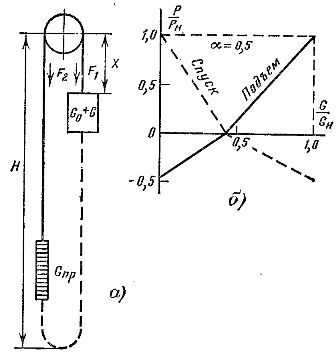
kanin. 1. Upang kalkulahin ang load sa elevator motor shaft.
Ang pangangailangan na balansehin ang mga mabibigat na barko ay halata, dahil upang ilipat ang mga ito sa kawalan ng isang counterweight, isang kaukulang pagtaas sa lakas ng makina ay kinakailangan. Ang kakayahang balansehin ang isang bahagi ng na-rate na kargamento ay ipinapakita kapag tinutukoy ang katumbas na kapangyarihan para sa isang naibigay na load curve.Hindi mahirap sundin, halimbawa, na kung ang elevator ay pangunahing gumagana upang itaas ang load at ibaba ang walang laman na sasakyan, kung gayon ang katumbas na lakas ng makina ayon sa load diagram ay may pinakamababa sa α = 0.5.
Ang pagkakaroon ng isang counterweight ay humahantong sa isang flattening ng load curve ng engine, na binabawasan ang pag-init nito sa panahon ng operasyon. Nagre-refer sa diagram na ipinapakita sa FIG. 1, a, pagkatapos ay may halaga ng timbang ng counterweight

at ang kawalan ng balancing na lubid at cabin friction at ang counterweight sa mga gabay, maaari mong isulat:


kung saan ang gk ay ang bigat ng 1 m ng lubid, N / m.
lakas ng makunat

Ang motor shaft torque at power ay tinutukoy batay sa mga sumusunod na formula:
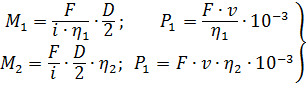
kung saan M1, P1 - metalikang kuwintas at kapangyarihan kapag ang drive ay nagpapatakbo sa motor mode, Nm at kW, ayon sa pagkakabanggit; M2, P2 - metalikang kuwintas at kapangyarihan kapag ang drive ay nagpapatakbo sa generator mode, Nm at kW, ayon sa pagkakabanggit; η1, η2 — kahusayan ng worm gear na may direkta at reverse na paglipat ng enerhiya.
Ang mga halaga ng η1 at η2 ay hindi linear na nakadepende sa bilis ng worm shaft at maaaring kalkulahin ng mga formula
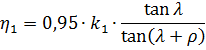

dito λ ay ang anggulo ng pag-akyat ng spiral line sa indexing cylinder ng uod; Ang k1 ay isang koepisyent na isinasaalang-alang ang mga pagkalugi sa mga bearings at oil bath ng gearbox; ρ - anggulo ng friction, depende sa bilis ng pag-ikot ng worm shaft.
Mula sa formula ng puwersa sa traction sheave, sumusunod na sa kawalan ng balancing rope, ang pagkarga sa electric drive ng lifting winch ay depende sa posisyon ng lifting vessel.
Dahil sa kanilang malaking kapasidad ng pag-load - hanggang sa 10 tonelada, mataas na bilis ng paggalaw - 10 m / s at higit pa, mataas na taas ng pag-aangat na 200-1000 m at malupit na mga kondisyon sa pagtatrabaho, ang mga makina ng pag-aangat ng minahan ay nilagyan ng mga lubid na bakal na may malaking masa. Isipin, halimbawa, na ang isang pass ay ibinababa sa ibabang abot-tanaw, habang ang isa ay nasa itaas, at sa sandaling iyon ay ibinababa ito. Sa posisyon na ito, ang buong lubid ng ulo ay hindi balanse, at sa simula ng pag-akyat ang motor ay dapat pagtagumpayan ang static na sandali na nabuo ng bigat ng pagkarga at ang lubid. Ang pagbabalanse ng lubid ay nagaganap sa gitna ng landas ng mga paglukso. Pagkatapos ay masira muli at ang bigat ng pababang bahagi ng lubid ay makakatulong sa pagbabawas ng makina.
Ang hindi pantay na pag-load, lalo na sa malalalim na mga minahan, ay humahantong sa pangangailangan na labis na timbangin ang lakas ng makina.Samakatuwid, sa taas na pag-aangat na higit sa 200-300 m, inirerekomenda na balansehin ang mga lubid na nakakataas sa ulo sa tulong ng mga lubid sa buntot na nasuspinde. ng mga nakakataas na sisidlan. Karaniwan, ang lubid ng buntot ay pinili na may parehong cross-section at haba bilang pangunahing isa, bilang isang resulta kung saan ang sistema ng pag-aangat ay nagiging balanse.
Dahil ang pag-load ay nagbabago sa panahon ng pagpapatakbo ng mga elevator at lifting machine, upang matukoy ang kapangyarihan o sandali ng motor shaft para sa bawat load, ito ay maginhawa upang bumuo ng isang graph ng pag-asa ng mga halagang ito sa load. sa ilang mga punto, na may humigit-kumulang na parehong karakter tulad ng ipinapakita sa fig. 1b at pagkatapos ay gamitin ito sa pagbuo ng mga diagram ng pagkarga.
Sa kasong ito, dapat malaman ang operating mode ng electric drive ng lifting machine, na higit na tinutukoy ng kamag-anak na tagal ng PV activation at ang bilang ng mga pagsisimula bawat oras ng motor. Para sa mga elevator, halimbawa, ang operating mode ng electric drive ay tinutukoy ng lugar ng pag-install at ang layunin ng elevator.
Sa mga gusali ng tirahan, ang iskedyul ng trapiko ay medyo pare-pareho, at ang relatibong tagal — PV at dalas ng pagsisimula ng motor h ay katumbas ng 40% at 90-120 na pagsisimula kada oras, ayon sa pagkakabanggit. Sa matataas na gusali ng opisina, ang karga ng elevator ay tumataas nang husto sa mga oras ng pagdating at pag-alis ng mga empleyado mula sa trabaho at, nang naaayon, sa panahon ng pahinga ng tanghalian, ang mga matataas na halaga ay magkakaroon ng PV at h-40-60% at 150 -200 simula bawat oras.
Matapos makumpleto ang pagguhit static na pagkarga sa motor shaft, ang electric drive system at hoist motor ay napili, ang pangalawang yugto ng pagbuo ng isang load diagram ay maaaring isagawa - isinasaalang-alang ang epekto ng lumilipas sa load diagram.
Upang makabuo ng isang kumpletong diagram ng pagkarga, kinakailangang isaalang-alang ang mga oras ng pagbilis at pagbabawas ng bilis ng electric drive, ang oras ng pagbubukas at pagsasara ng mga pinto, ang bilang ng mga hinto sa panahon ng paggalaw ng kotse, ang oras. ng pagpasok at paglabas ng mga pasahero sa panahon ng pinakakaraniwang ikot ng trabaho. Para sa mga elevator na may awtomatikong pinapatakbo na mga pinto, ang kabuuang pagkawala ng oras na tinutukoy ng pagpapatakbo ng mga pinto at ang pagpuno ng kotse ay 6-8 s.
Ang mga oras ng acceleration at deceleration ng kotse ay maaaring matukoy mula sa motion diagram kung ang nominal na bilis ng kotse at ang mga pinahihintulutang halaga ng acceleration (deceleration) at jerk ay kilala. Ayon sa load diagram, na binuo ayon sa ipinahiwatig na static at dynamic na mga mode ng electric drive system, kinakailangan na gumawa ng computational na pagkalkula ng motor kapag pinainit, gamit ang isa sa mga kilalang pamamaraan: average na pagkalugi o katumbas na mga halaga.
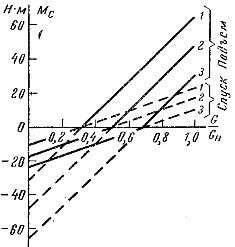
kanin. 2. Dependencies ng torque ng electric drive sa load ng kotse, ang elevator, kapag ang huli ay nasa unang palapag (1), sa gitna ng shaft (2) at sa huling palapag (3).

Isang halimbawa. Ayon sa teknikal na data ng isang high-speed na elevator ng pasahero, tukuyin ang mga static na sandali sa motor shaft sa iba't ibang mga operating mode.
Ibinigay:
• maximum load capacity Gn = = 4900 N;
• bilis ng paggalaw v = 1 m / s;
• taas ng pag-angat H = = 43 m;
• timbang ng cabin G0 = 6860 N;
• counterweight na timbang Gnp = 9310 N;
• diameter ng traction beam Dm = 0.95 m;
• transmission ratio ng winch gearbox i = 40;
• kahusayan sa paghahatid, isinasaalang-alang ang alitan ng cabin sa mga gabay ng baras η = 0.6;
• bigat ng lubid GKAH = 862 N.
talahanayan 1

Lakas ng Tensile:


Kapag gumagana ang elevator system, kapag Fc > 0, gumagana ang de-koryenteng makina sa motor mode, at kapag Fc ay 0, at nasa motor mode kapag Fc < 0.
Ang mga resulta ng pagkalkula ng mga static na sandali ayon sa formula ay ibinubuod sa isang talahanayan. 1 at ipinapakita sa graph ng fig. 2.Tandaan na ang mas tumpak na mga kalkulasyon ay dapat isaalang-alang ang paglaban sa paggalaw ng mga gabay ng baras, na 5-15% ng Fc.