Diagram ng koneksyon ng pandurog
 Ang mga pandurog ng iba't ibang disenyo ay ginagamit upang durugin ang mga butil ng kumpay at magaspang. Ang prinsipyo ng pagtatrabaho at circuit diagram ng kontrol ng DB type sieveless sieve ay ipinapakita sa Figure 1.
Ang mga pandurog ng iba't ibang disenyo ay ginagamit upang durugin ang mga butil ng kumpay at magaspang. Ang prinsipyo ng pagtatrabaho at circuit diagram ng kontrol ng DB type sieveless sieve ay ipinapakita sa Figure 1.
Ang paggiling ng butil gamit ang auger 8 (Larawan 1) ay na-load sa hopper 9, ang antas nito ay awtomatikong pinananatili batay sa impormasyon mula sa dalawang sensor. Ang supply ng butil para sa paggiling ay kinokontrol ng isang damper 10. Sa kasong ito, ang produkto ng pagdurog ay dinadala ng daloy ng hangin sa pamamagitan ng linya ng supply patungo sa filter 6.
Ang sapat na durog na butil na dumaan sa screen separator 4 ay isang tapos na produkto, na inilalabas mula sa auger 2. Ang natitira ay ibinabalik sa silid ng pagdurog, at ang halaga ng produktong ito ay itinakda ng operator gamit ang regulating valve 5 ( sa sobrang tamang posisyon, ang lahat ng materyal ay napupunta sa discharge nang walang fractionation). Ang isang bahagi ng maalikabok na hangin ay ibinalik sa shredding chamber, at ang isa pang bahagi, na dumadaan sa filter 6, ay pinalabas sa atmospera.
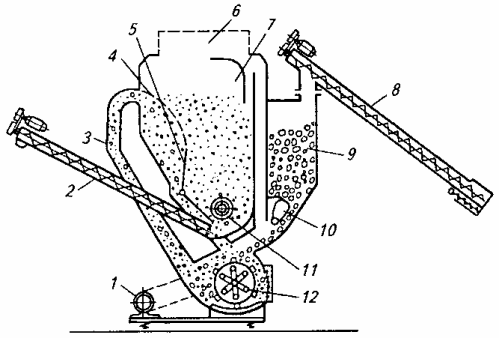
kanin. 1.Functional na diagram ng DB-5 crusher: 1 — engine, 2, 8 — augers, 3 — air duct, 4 — separator, 5, 10 — shock absorbers, 6 — filter, 7 — chamber, 9 — grain hopper, 11 — agitator, 12 - rotor
Ang control circuit ng crusher (Fig. 2) ay nagbibigay ng sequential start ng unloading auger motors (M1) at pagkatapos ay ang crusher (M2), at upang bawasan ang panimulang kasalukuyang, ang crusher motor ay konektado sa isang «star» circuit, at pagkatapos ay lumipat sa isang "delta" circuit. Ang filling auger ay sinisimulan sa pamamagitan ng pagpindot sa SB6 button na may walang laman na crusher hopper.
Gumagana ang auger hanggang sa sarado ang mga contact ng SL1 ng membrane sensor sa itaas na antas ng butil sa hopper. Magnetic starter KM4 at relay KV ay de-energized kapag na-bypass sa pamamagitan ng contact SL1. Awtomatikong magre-restart ang auger pagkatapos matanggal ang laman ng hopper at buksan ang mga contact ng mga sensor ng mga upper level na SL1 at lower SL2.
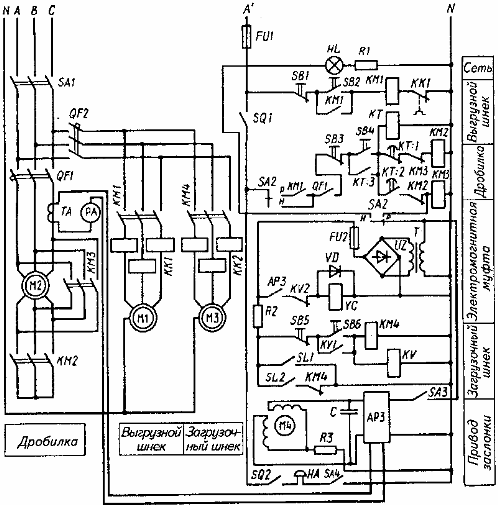
kanin. 2. Electrical diagram ng pandurog
Ang kapasidad ng pandurog ay awtomatikong kinokontrol sa pamamagitan ng isang regulating valve na inilipat ng M4 actuator sa ilalim ng utos ng automatic load regulator (ARZ).
Sa kaganapan ng isang makabuluhang labis na karga ng motor at pagkagambala ng suplay ng kuryente, ang electromagnetic clutch YC, na nagkokonekta sa shock absorber sa IM, ay hindi nakakonekta mula sa contact ARZ, ang shock absorber ay nahulog sa ilalim ng sarili nitong timbang at ang supply ng butil sa pagdurog kamara tumitigil.
Ang buong pagbubukas ng damper, na nagpapahiwatig ng pagbawas sa pagkarga ng crusher, ay sinenyasan ng HA horn kapag ang limit switch SQ2 ay sarado.
Ang mga chopper, kutsilyo o martilyo ay ginagamit sa pagputol ng dayami at dayami.Ang hilaw na materyal na durog ay ipapakain sa feed hopper, na, habang ito ay umiikot, itinapon ito sa ilalim ng mga martilyo ng rotor ng silid ng pagdurog. Ang durog na masa ay dinadala sa labas ng silid sa pamamagitan ng daloy ng hangin na nabuo ng mga rotary hammers.
Tinitiyak ng control circuit ang sunud-sunod na pagsisimula ng mga makina ng crusher at pagkatapos (pagkatapos ng 20 s) ang hopper. Sa kasong ito, ang pandurog ay sinimulan sa pamamagitan ng paglipat ng motor mula sa "star" circuit sa "delta" circuit.
Sa kaganapan ng isang labis na karga sa motor ng pandurog, ang electromagnetic clutch ay pansamantalang natanggal at ang feed sa pandurog ay nagambala. Matapos bawasan ang pagkarga sa pandurog, ang kapangyarihan ay ipinagpatuloy. Kung ang overload ng motor ay tumatagal ng higit sa 20 s, ang motor ng hopper drive ay naka-off.