Electric trolley drive na may mga overhead crane
Ang isang trolley na may overhead crane ay isang independiyenteng elemento ng isang lifting device at idinisenyo upang ilipat ang mga load sa loob ng saklaw ng overhead crane na may teknolohikal na tinutukoy na bilis ng paggalaw at ang kinakailangang katumpakan ng pagpoposisyon ng load. Ang bogie drive ay isa sa mga pangunahing bahagi ng overhead crane equipment.
Ang troli ay gumagalaw sa track ng isang overhead crane. Ang tulay mismo ay gumagalaw sa isang direksyon na patayo sa direksyon ng paggalaw ng cart. Ang isang mekanismo ng pag-aangat ay naka-install sa cart, na nilagyan ng hook (o electromagnet) kung saan maaari mong ilipat ang pagkarga. Ang paggalaw ng bogie ay isang mahalagang bahagi ng teknolohikal na cycle ng overhead crane (Larawan 1).
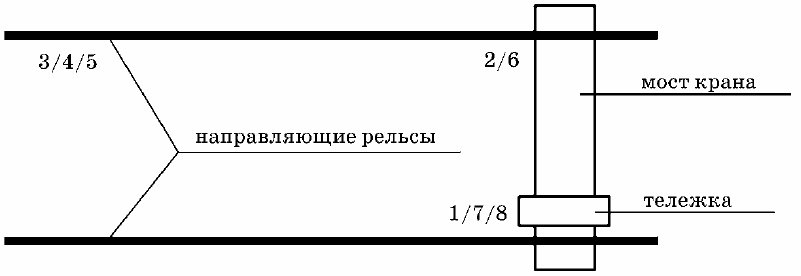
kanin. 1. Scheme para sa pagsasagawa ng mga operasyon gamit ang isang bridge crane sa isang working cycle
Ang cycle na ito ay binubuo ng mga sumusunod na operasyon (sa Figure 1, ang mga numero ng operasyon ay ipinapakita sa mga numero):
1 — pag-angat ng karga;
2 — paglipat ng cart sa isang naibigay na posisyon;
3 — paglipat ng kreyn sa isang paunang natukoy na posisyon;
4 — pagbabawas ng bigat ng pasanin;
5 — pag-angat ng kawit na may bigat ng karga;
6 — paglipat ng kreyn sa orihinal nitong posisyon;
7 — paglipat ng cart sa orihinal nitong posisyon;
8 — pagbaba ng hook.
Tulad ng makikita mula sa ikot ng proseso ng overhead crane, ang trolley drive na motor ay nakabukas sa ikalawa at ikapitong operasyon. Kapag ang bogie ay lumalapit sa isang partikular na posisyon sa layo ng overhead crane, ang de-koryenteng motor ng bogie drive ay de-kuryenteng nakapreno upang matiyak ang kinakailangang katumpakan ng pagpreno.
Pagkatapos ay pinapatay ang makina at inilapat ang isang mekanikal na preno. Bilang karagdagan, ang electric drive ng paggalaw ng tulay ay nakabukas at ang load ay gumagalaw sa kahabaan ng pagawaan ayon sa teknolohikal na gawain. Pag-abot sa itinalagang lugar, huminto ang kreyn, ibinababa ang load, at pagkatapos ay isinasagawa ang mga kinakailangang teknolohikal na operasyon.

Ang kinematic diagram ng mekanismo ng paggalaw ng trolley na may mga overhead crane ay ipinapakita sa Figure 2. Ang mekanismo ng paggalaw ng trolley ay ginawa ayon sa scheme na may gearbox sa gitna sa pagitan ng mga gulong ng drive.
Ang drive mula sa de-koryenteng motor D sa pamamagitan ng brake disc T, gearbox P, clutches M at shafts B ay ipinapadala sa mga tumatakbong gulong. Ginagamit ang brake pulley upang mapanatiling nakatigil ang cart.
Ang cart ay may apat na gulong sa paglalakbay at dalawang gulong sa pagmamaneho. Ang mga naglalakbay na gulong ng mga crane trolley ay karaniwang gawa sa dalawang tadyang.
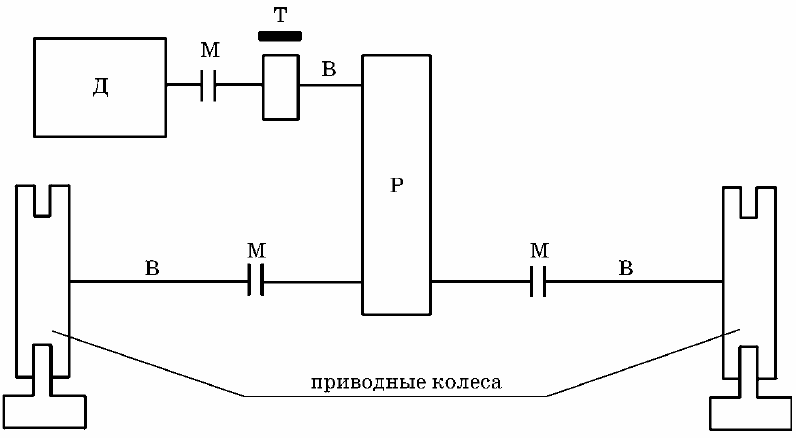
kanin. 2. Kinematic diagram ng mekanismo ng paggalaw ng troli
Ang oras upang ilipat ang cart sa tinukoy na posisyon ay matutukoy sa pamamagitan ng pagsasaalang-alang sa oras upang mapabilis at i-decelerate ang cart sa kinakailangang acceleration.Batay sa mga kondisyon ng teknolohikal na proseso, ang tachogram kapag inililipat ang cart ay dapat magkaroon ng form na ipinapakita sa Figure 3.
Ito ay kinakailangan upang matiyak ang isang maayos na pagsisimula ng bogie na mekanismo sa isang naibigay na bilis na may kinakailangang acceleration. Upang matiyak ang kinakailangang katumpakan ng pagpoposisyon, kinakailangan ang isang maayos na pagbabawas ng bilis ng electric drive na may paglipat sa pinababang bilis, pagkatapos nito ay huminto ang troli.
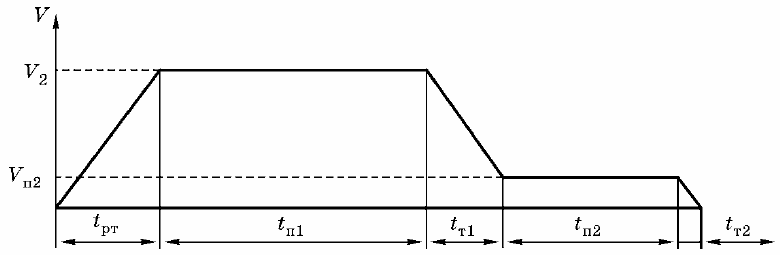
kanin. 3. Tachogram ng mekanismo ng paggalaw ng troli
Ang paggalaw ng bogie na may mga epekto sa istraktura ng metal sa mga joints ng tren, matinding acceleration at deceleration, natural na vibrations ng metal structure kapag ang mga makina ay na-load ay nagdudulot ng napakatinding mekanikal na epekto sa mga electrical equipment na matatagpuan sa bridge crane bogie. Batay dito, ang electric drive para sa paglipat ng troli ay dapat matugunan ang mga sumusunod na kinakailangan:
1) ang electric drive ay dapat magbigay ng kakayahang simulan ang mekanismo sa paggalaw, baligtarin ang direksyon ng paggalaw at itigil ang mekanismo na may kinakailangang acceleration (m / s2) at tamang katumpakan ng pagpoposisyon (mm);
2) ang electric drive ay dapat magbigay ng makinis na kontrol ng bilis pababa mula sa pangunahing;
3) ang binuo na metalikang kuwintas ng makina ay dapat tiyakin ang pagpapatakbo ng mekanismo sa isang naibigay na intensity;
4) sa isang naibigay na bilang ng pagsisimula ng makina bawat oras, hindi dapat magkaroon ng sobrang pag-init ng mga paikot-ikot nito, dahil sa kung saan posible ang isang matagal na paghinto ng mekanismo;
5) ang motor ay dapat mapili alinsunod sa mga kondisyon ng operating, iyon ay, dapat itong magkaroon ng angkop na disenyo, at ang mga windings nito ay dapat na lumalaban sa init at may pagkakabukod laban sa kahalumigmigan;
6) ang drive motor ay dapat magkaroon ng pinakamaliit na masa ng flywheel na may malaking epekto sa daloy ng mga lumilipas sa panahon ng madalas na pagsisimula ng pagmamaneho;
7) ang drive motor ay dapat tumugma sa kapangyarihan ng tumatakbo na mekanismo at may kinakailangang labis na kapasidad;
8) dapat tiyakin ng electric drive ang pagbuo ng mga lumilipas na proseso na may pinakamababang tagal;
9) ang kaligtasan at kadalian ng pagpapanatili ay dapat isaalang-alang sa disenyo ng electric drive.

Ang static na sandali para sa mga mekanismo ng paggalaw na tumatakbo sa isang pahalang na linya ng track sa isang pasilidad ng produksyon ay nilikha sa pamamagitan ng pag-slide ng frictional forces sa mga bearings at rolling friction ng bogie wheels na gumugulong sa mga riles ng overhead crane. Ang static na sandali ng mekanismo sa panahon ng pasulong na paggalaw ng troli ay tinutukoy ng kapasidad ng pag-angat ng kreyn. Ang static na sandali ng mekanismo sa panahon ng reverse movement ng bogie ay kinakalkula para sa isang hindi kumpletong pagkarga.
Para sa electric drive ng trolley ng overhead crane, asynchronous squirrel-cage rotor motors (kabilang ang bilang bahagi ng isang variable frequency drive), mga sugat na rotor induction motor at independiyenteng nasasabik na mga DC motor.