Motor control circuits bilang isang function ng bilis
 Sa kontrol ng motor, ang bilis ay sinusubaybayan bilang isang function ng bilis ng rotor ng motor upang maimpluwensyahan ang kaukulang mga elemento ng kontrol habang nagbabago ito.
Sa kontrol ng motor, ang bilis ay sinusubaybayan bilang isang function ng bilis ng rotor ng motor upang maimpluwensyahan ang kaukulang mga elemento ng kontrol habang nagbabago ito.
Ang mga speed control relay o maliit na pagsukat ng mga electric generator ay maaaring gamitin sa motor starting control circuits. Gayunpaman, ang mga ito ay bihirang ginagamit para sa mga layuning ito dahil sa pagiging kumplikado ng disenyo, mataas na gastos at hindi sapat na pagiging maaasahan. Samakatuwid, ang bilis ng engine ay kinokontrol ng mga hindi direktang pamamaraan. Sa asynchronous at synchronous motors, ang rotational frequency ay kinokontrol ng emf at frequency ng rotor current, at sa direct current motors ng armature emf.
Sa fig. Ang 1, a at b ay nagpapakita ng mga scheme para sa awtomatikong pagsisimula ng isang parallel-excited na DC motor depende sa dalas ng pag-ikot at depende sa EMF at ang boltahe ng armature mula sa oras ng pagsisimula. Ang kontrol ng dalas ng pag-ikot ay isinasagawa sa pamamagitan ng pagsukat ng EMF ng motor, na nag-iiba sa proporsyon sa dalas ng pag-ikot.
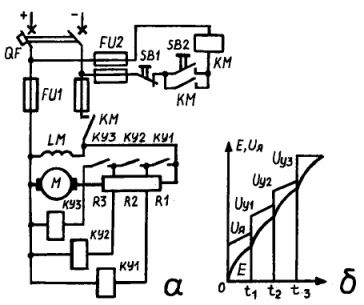
kanin. 1.Mga control circuit bilang isang function ng bilis: a at b — circuit at panimulang diagram ng isang parallel-excited na DC motor
Dahil ang EMF ay proporsyonal sa bilis ng engine, ang awtomatikong pag-input ng mga indibidwal na yugto ng panimulang rheostat ay isinasagawa sa isang tiyak na magnitude ng actuating boltahe ng mga nagpapabilis na contactor na KM1, KM2 at KMZ, na ang bawat isa ay nakatakda sa isang tiyak na pagbawi. halaga. Sa pamamagitan ng pagpindot sa starter mga pindutan Ino-on ng SB2 ang contactor ng linya ng KM. Ang lahat ng mga resistances R1, R2, R3 ay konektado sa serye na may armature winding at lilimitahan ang kasalukuyang.
Sa isang tiyak na bilis n1, ang boltahe Uy1 ng coil ng contactor K1 ay

kung saan Narito Ito ang koepisyent ng makina.
Kapag ang Uy1 ay magiging katumbas ng pull-down na boltahe, ang contactor na KM1 ay gagana at mag-short-circuit ang resistensyang R1. Ang karagdagang pagtaas sa bilis ng pag-ikot hanggang sa pag-ikot ng n2 at n3 ay hahantong sa pagtaas ng boltahe sa mga coils ng mga contactor na K2 at isang maikling circuit sa mga halaga


Sa kasong ito, ang mga contactor na K2 at ang maikling circuit ay gagana sa serye at maikling circuit ang mga resistensyang R2 at R3. Matapos mai-short-circuiting ang resistensya R3, ang proseso ng pagsisimula ay makukumpleto at ang motor ay maaaring tumakbo nang mahabang panahon.
Ang EMF sa rotor circuit ng induction motor ay proporsyonal sa slip, ibig sabihin, E2s = E2s. Narito ang E2 ay ang emf ng isang nakatigil na rotor.
Kung mas mababa ang slip, mas mababa ang EMF, iyon ay, mas mataas ang bilis ng rotor ng motor. Upang kontrolin ang pagsisimula ng AC motors na may rotor ng sugat, ginagamit ang mga relay na kumokontrol sa halaga ng EMF sa rotor circuit.Ang kaukulang mga aparato (relay, contactor) na ang mga short-circuit na panimulang resistensya ay nababagay sa mga boltahe na ito.
Para sa kontrol ng mga sugat-rotor induction motors at kasabay na motors, ang frequency method ay maaari ding gamitin bilang isang function ng bilis. Ang pamamaraang ito ay batay sa kilalang pag-asa ng dalas ng rotor kasalukuyang f2 sa dalas ng pag-ikot ng stator field n0 at ang rotor n2, i.e.
Dahil ang bawat bilis ng rotor ay tumutugma sa isang tiyak na halaga ng f2, ang isang relay na nakatakda sa dalas na iyon at konektado sa motor rotor circuit ay kikilos sa contactor coil circuit. I-short circuit ng contactor ang mga yugto ng paglaban sa isang naibigay na bilis.
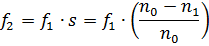
Ang pagpepreno ng magkasalungat na motor ay ginagawa depende sa bilis relay ng kontrol ng bilis SR. Sa Fig. 2, a, b ay nagpapakita ng mga halimbawa ng paghinto ng mga asynchronous na motor sa pamamagitan ng oposisyon.
kanin. 2. Mga scheme ng pagpapahinto ng mga asynchronous na motors sa pamamagitan ng oposisyon: a — non-reversible; b - nababaligtad
Tingnan natin kung paano gumagana ang mga scheme na ito.
Ang pagpindot sa pindutan ng SB2 ay lumiliko sa coil ng contactor KM (tingnan ang Fig. 2, a), na nagsasara ng mga contact ng kuryente at hinaharangan ang pindutan ng SB2. Kasabay nito, ang contact ng opening block KM sa circuit ng coil ng brake contactor KM1 at ang speed control relay na SR ay nagdiskonekta sa kanila mula sa network. Kapag ang motor rotor ay umabot sa isang tiyak na bilis, ang SR contact ay magsasara, ngunit ito ay hindi na magiging sanhi ng KM1 contactor upang gumana. Ang makina ay patuloy na tumatakbo nang normal.
Ang pagpapahinto sa motor gamit ang isang counter-switching brake ay ginagawa sa pamamagitan ng pagpindot sa SB button.Kasabay nito, ang coil ng contactor KM ay neutralized, at ang mga pangunahing contact nito ay nawawala at idiskonekta ang motor mula sa network. Ang KM opening contact sa brake contactor circuit ng KM1 ay magsasara. Dahil sa sandaling ito ang contact ng speed control relay SR ay sarado, ang mga pangunahing contact ng brake contactor ay agad na naka-on at ang stator winding ay inililipat sa reverse, ang magnetic field ay magsisimulang iikot sa tapat na direksyon, i.e. ang pag-ikot ng rotor at ang motor ay titigil sa pamamagitan ng counter switching. Ang bilis ng rotor ay bumababa at sa isang tiyak na maliit na halaga ang mga contact nito ng RKS speed control relay ay magbubukas at idiskonekta ang motor mula sa mains.
Sa kaso ng reverse control na may kabaligtaran na pagpepreno (Larawan 2, b), ang motor ay sinimulan pasulong sa pamamagitan ng pagpindot sa pindutan ng SB1, na, sa pamamagitan ng pagsasara ng circuit ng coil ng contactor KM1, tinitiyak na ang motor ay konektado sa network. Ang motor rotor ay magsisimulang umikot at kapag umabot na ito sa isang tiyak na bilis, ang pagsasara ng contact SR1 ng speed control relay ay magsasara at ang pambungad na contact na SR2 ay magbubukas.
Ang pag-switch sa coil ng contactor KM2 ay hindi mangyayari dahil ang opening contact ng contactor KM1 ay nasira ang circuit nito. Sa posisyong ito, patuloy na tatakbo ang motor hanggang sa pinindot ang SB button. Kapag pinindot ang SB button, naka-off ang circuit ng coil KM1. Isasara nito ang break contact KM1 at ang coil circuit ng contactor KM2 ay makakatanggap ng power.
Ang paikot-ikot na stator ng motor ay sasali sa pag-reverse. Habang ang rotor ay patuloy na umiikot sa parehong direksyon sa pamamagitan ng pagkawalang-galaw, nangyayari ang opposition braking.Kapag ang bilis ay bumaba sa isang tiyak na maliit na halaga, ang bilis ng control relay ay bubukas ang kanyang contact SR1, ang contactor KM2 ay i-off at idiskonekta ang motor mula sa network.
Upang simulan ang makina sa reverse, pindutin ang SB2 button. Ang buong proseso ay magiging katulad ng inilarawan. Ngayon ang papel ng brake contactor ay ginagampanan ng KM1 contactor, at ang SR2 contact ng speed control relay ay kokontrol sa proseso ng pagpepreno.
Ang awtomatikong pagsisimula ng isang kasabay na motor ay nauugnay sa mga kilalang paghihirap, dahil sa kasong ito kinakailangan hindi lamang upang limitahan ang panimulang kasalukuyang, kundi pati na rin upang i-synchronize ang makina sa network.
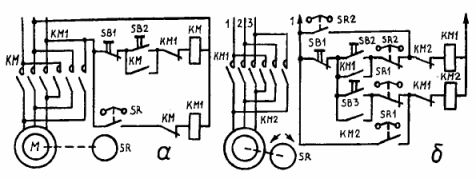
Ang control circuit para sa isang low power synchronous motor ay ipinapakita sa Fig. 3. Ang limitasyon sa kasalukuyang pagpasok ay ibinibigay ng mga aktibong resistensya na kasama sa paikot-ikot na stator. Bago simulan ang makina, i-on ang mga awtomatikong input switch na QF at QF1 ng AC at DC mains, na nagbibigay ng maximum at thermal protection. Sa pamamagitan ng pagpindot sa start button SB2, ang coil ng contactor KM ay naka-on, at ang stator winding ng synchronous motor sa pamamagitan ng mga pangunahing contact ng KM ay konektado sa network sa pamamagitan ng mga panimulang resistors Rn. Ang coil ay self-locking at ang contact nito sa DC circuit ay kinabibilangan ng locking relay KV, ang pagsasara ng contact na kung saan, pagsasara, ay naghahanda ng mga coils ng contactors K1 at K2 para sa paglipat sa.
Ang frequency relay na KF1 at KF2 sa excitation circuit ng LM rotor ay gumagana depende sa bilis ng engine.Ang pagbubukas ng mga coil ay nangyayari bago ang KV blocking relay at ang K1 coil ay hindi makakatanggap ng kapangyarihan. Ang mga contact ng relay na KF1 at KF2 ay muling magsasara kapag ang RPM ng makina ay umabot sa humigit-kumulang 60-95% nang sabay-sabay alinsunod sa regulasyon ng relay.
Matapos isara ang mga contact ng relay KF1, ang coil ng contactor K1 ay i-on, ang mga contact nito sa pangunahing circuit ay mag-short-circuit sa panimulang resistors Rp at ang stator ay i-on sa buong boltahe ng linya. Kapag ang mga bukas na contact ng relay KF2 ay sarado, ang isang circuit ay nilikha upang matustusan ang coil ng contactor K2, nang nakapag-iisa sa contactor K1, ang contact nito ay bubukas sa bilis na humigit-kumulang 60% ng kasabay na bilis.
Ang Contactor K2 ay may dalawang windings: isang pangunahing, paghila ng KM1 at ang pangalawang paikot-ikot na KM2, na idinisenyo upang bitawan ang lock, na ibinigay kasama ng contactor. Matapos i-on ang take-up coil KM1, ang pagsasara ng mga contact na K2 ay nagsasara sa circuit ng paggulo, at ang pagbubukas ng mga contact na K2 ay nakabukas, na dinidiskonekta ang rotor winding mula sa discharge resistors R1 at R2 at ikinonekta ang rotor sa DC network.
kanin. 3. Synchronous na motor control scheme
Gumagana ang mga contact ng contactor K2 sa sumusunod na pagkakasunud-sunod. Ang N / O contact K2 ay bumubukas sa supply circuit ng pickup coil, ngunit ang pagkilos ng pagharang ay nagpapanatili ng lakas ng contactor. Ang pagsasara ng mga contact K2 ay malapit sa supply circuit ng dalawang coils at sa circuit ng coil KM2, inihahanda ang circuit para sa kasunod na paglipat sa. Ang Coil K2 ay mawawalan ng lakas sa sandaling ang locking mechanism ay inilabas mula sa coil KM2. Ang motor ay hindi nakakonekta sa mains sa pamamagitan ng pagpindot sa SB1 button.Inilalabas ng Coil K1 ang pambungad na contact nito sa circuit ng coil KM2, na naglalabas ng latch at pinapatay ang coil KM1, pagkatapos ay bumalik ang circuit sa orihinal nitong posisyon.