Motor control circuits bilang isang function ng kalsada
 Ang directional automation o kontrol sa isang function ng path ay ginagamit upang limitahan ang paggalaw ng isang mekanismo o ihinto ito sa anumang intermediate o end point ng path.
Ang directional automation o kontrol sa isang function ng path ay ginagamit upang limitahan ang paggalaw ng isang mekanismo o ihinto ito sa anumang intermediate o end point ng path.
Ang mga pangunahing opsyon para sa kinokontrol na mga siklo ng tungkulin mga elemento ng rail automation, ay maaaring: awtomatikong pag-shutdown ng electric drive sa dulo ng cycle, pag-reverse na may awtomatikong limitasyon ng path ng paggalaw ng bawat elemento ng drive nang walang hawak na oras at may pagpindot sa mga end point, pag-reverse sa pagpapahinto ng mekanismo pagkatapos ng bawat cycle o may mahabang shuttle movement.
Sa mga kaso kung saan ang malfunction ng limit switch ay maaaring humantong sa isang aksidente, ang mga limit switch ay naka-install din upang patayin ang makina.
Sa mga driven circuit, ang power section na may magnetic starters ay hindi ipinapakita: ang mga pangunahing contact ng supply circuit ay hinihimok: sa pamamagitan ng coil KM na may non-reversible starter at coils KM1 at KM2 kung ang starter ay reversible
Ang mga diagram sa fig.Ang a at b ay nagbibigay para sa pag-off ng motor sa dulo ng paggalaw ng mekanismo sa pamamagitan ng limit switch at naiiba sa bawat isa lamang sa paglalagay nito sa control circuit at ang mga nagresultang functional na katangian. Sa unang circuit, ang motor na huminto sa limit switch ay hindi maaaring i-restart sa parehong direksyon sa pamamagitan ng pagpindot button para sa pagsisimula, sa pangalawang pamamaraan ang mekanismo ay maaaring magpatuloy sa paglipat kung ang pindutan ay pinindot muli.
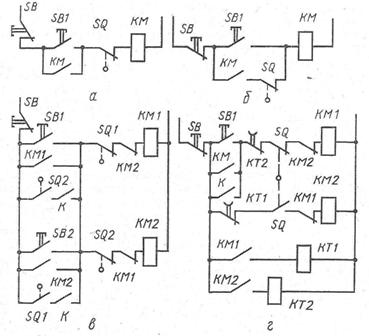
kanin. Ang mga scheme ng kontrol ng motor bilang isang function ng paglalakbay na may mga switch ng limitasyon: a at b - pagsara ng motor sa dulo ng paggalaw ng mekanismo, c - na may limitasyon ng paggalaw ng mekanismo, d - cyclic na paggalaw na may pagkaantala sa oras ng mga posisyon sa pagtatapos
Ang control circuit ng Fig. c ay nagbibigay para sa paggalaw ng mekanismo sa kahabaan ng isang landas na limitado sa pamamagitan ng dalawang limit switch SQ1 at SQ2, at ang trabaho ay maaaring isagawa pareho sa discrete at tuloy-tuloy na mga stroke. Sa unang kaso, ang mekanismo ay magsisimulang umusad kapag ang button na SB1 ay pinindot at gumagalaw hanggang sa pinindot nito ang limit switch SQ1. Upang alisin ang mekanismo sa posisyong ito, pindutin ang SB2 button.
Ang pagbubukas ng mga contact KM2 at KM1 sa mga circuit ng coils KM1 at KM2 ay ginagamit para sa pagharang.

Para sa paikot na operasyon ng mekanismo na may iba't ibang mga pagkaantala sa oras sa mga posisyon ng pagtatapos, ang diagram sa fig. d. Kapag sinimulan ang engine forward, ang start button SB1 ay i-on ang time relay KT1 at binubuksan ang contact nito sa circuit ng coil ng contactor KM2. Ang paggalaw ay nagpapatuloy hanggang ang trip switch SQ ay kumilos, na nagbubukas sa circuit ng contactor coil KM1 at nagsasara ng SQ contact na mekanikal na konektado dito. Ngunit ang pagbabalik ay hindi nangyayari kaagad, dahil ang pagbubukas ng contact na KT1 ay bukas pa rin.
Ang time relay na KT1, na nadiskonekta mula sa contact na KM1, ay binibilang ang itinakdang pagkaantala ng oras at ini-on ang coil ng contactor KM2, pinaikot ang motor. Sa pamamagitan ng contact ng closing block na KM2, ang time relay na KT2 ay bubukas at sinisira ang circuit ng coil KM1 na may contact na KT2. Ang de-koryenteng motor ay bubukas at ginagalaw ang mekanismo hanggang sa ang switch ng limitasyon ay pinaandar, pagkatapos nito ay umuulit ang cycle sa parehong pagkakasunud-sunod.
Kung, ayon sa mga kondisyon ng pagpapatakbo, ang isang pagkaantala ng oras ay kinakailangan sa isang posisyon lamang sa dulo, pagkatapos ay isang beses na relay at ang pambungad na contact nito ay pinapatay sa control circuit.