Motor control circuits bilang isang function ng oras
 Ang ganitong uri ng kontrol ay ginagamit kapag ang lahat ng paglipat sa de-koryenteng circuit ng de-koryenteng motor ay nagaganap sa ilang sandali ng oras, halimbawa, kapag awtomatiko ang proseso ng pagsisimula ng mga de-koryenteng motor nang hindi sinusubaybayan ang bilis o kasalukuyang. Ang tagal ng mga agwat ay tinutukoy at maaaring iakma ng mga setting ng time relay.
Ang ganitong uri ng kontrol ay ginagamit kapag ang lahat ng paglipat sa de-koryenteng circuit ng de-koryenteng motor ay nagaganap sa ilang sandali ng oras, halimbawa, kapag awtomatiko ang proseso ng pagsisimula ng mga de-koryenteng motor nang hindi sinusubaybayan ang bilis o kasalukuyang. Ang tagal ng mga agwat ay tinutukoy at maaaring iakma ng mga setting ng time relay.
Ang kontrol sa oras ay nakatanggap ng pinakamalaking pagkalat sa industriya dahil sa pagiging simple at pagiging maaasahan ng mass production na electromagnetic at electronic na mga relay ng oras.
Kaya, mula sa fig. 1, a at b, makikita na sa pamamagitan ng pagsasara ng contact K ng contactor ng linya, ang buong paglaban ng rheostat ay kasama sa armature circuit, katumbas ng R1 + R2 + R3, at ang pagsasama ng mga seksyon ng panimulang paglaban maaaring mangyari sa ilang partikular na agwat ng oras t1, t2 at t3 sa ilang partikular na bilis ng engine n1, n2, n3 at kapag bumaba ang inrush current sa itinakdang halaga na I2. Ang mga agwat ng oras ay pinili upang sa bawat kasunod na maikling circuit ng paglaban, ang kasalukuyang motor ay hindi lalampas sa pinahihintulutang I1.
Habang bumibilis ang motor mula n = 0 hanggang n1, bumababa ang kasalukuyang sa I2 bilang resulta ng pagtaas ng puwersa ng electromotive sa likuran. Pagkatapos ng isang agwat ng oras t1, ang contact K1 ay nagsasara, ang shunting resistance R1, na humahantong sa pagbaba ng resistensya ng rheostat sa R2 + R3, isang bagong pagtaas sa kasalukuyang sa I1, atbp. Sa pagtatapos ng pagsisimula, ang motor ay nagpapabilis sa rate ng bilis, ang panimulang rheostat ay ganap na tinanggal.
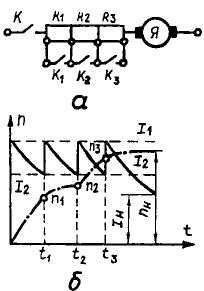
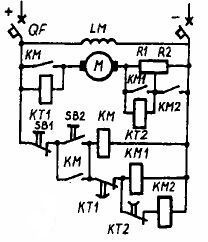
kanin. 1. Mga motor control circuit bilang isang function ng oras: a — DC motor na panimulang rheostat, b — panimulang diagram
Isaalang-alang ang ilang motor control circuit bilang isang function ng oras.
Sa time-dependent na kontrol ng isang induction motor na may rotor ng sugat (Larawan 2), ang pagkaantala ng oras na kinakailangan upang mai-short-circuit ang mga indibidwal na hakbang ng panimulang rheostat ay ibinibigay ng mga relay ng oras ng pendulum, na ang bilang ay katumbas ng bilang ng hakbang. Ang scheme ay gumagana tulad ng sumusunod.
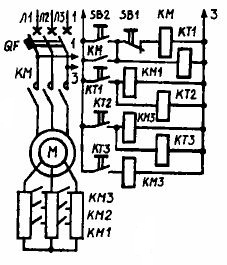
kanin. 2. Control circuit bilang isang function ng oras ng isang sugat-rotor induction motor
Kapag nag-click ka sa pindutan Ang SB1 ay tumatanggap ng kapangyarihan sa contactor coil sa linya ng KM, na nagkokonekta sa stator ng motor sa mga mains. Kasabay nito, ganap na ipinakilala ang output rheostat. Kasama ang contactor, ang time relay KT1 ay naka-on, na pagkatapos ng isang tiyak na agwat ng oras ay isinasara ang contact sa circuit ng coil ng contactor KM1.
Ang contactor ay nagpapatakbo at nagsasara sa unang seksyon ng rheostat upang simulan ang rotor. Kasabay nito, ang time relay na KT2 ay naka-on, na nagsasara ng mga contact nito nang may pagkaantala at naka-on ang coil KM2 at ang time relay na KTZ. Ang mga contact ng contactor KM2 short circuit ang ikalawang yugto KM2 ng panimulang rheostat.Bilang karagdagan, sa isang pagkaantala ng oras, ang contact ng KTZ relay ay na-trigger, na i-on ang KMZ winding, na gumagawa ng isang maikling circuit ng huling yugto ng KMZ na panimulang rheostat, at ang motor ay patuloy na gumagana sa hinaharap, tulad ng sa isang squirrel rotor.
Ang motor ay huminto sa pamamagitan ng pagpindot sa SB button, at sa kaso ng overload, ang motor ay pinapatay sa pamamagitan ng pagpapakawala ng QF switch. Ino-off nito ang line contactor, ang auxiliary contact KM nito at lahat ng acceleration contactor at non-time delay time relay. Handa na ang chain para sa susunod na cycle.
Upang simulan ang idle speed ng isang induction motor na may tumaas na kapangyarihan sa paglipat ng stator winding mula sa isang bituin patungo sa isang delta, maaari mong gamitin ang diagram sa Fig. 3. Ang paglipat sa circuit na ito ay awtomatikong ginagawa bilang isang function ng oras. Sa pamamagitan ng pagpindot sa button na SB2, ang stator winding ay konektado sa network ng contactor KM. Kasabay nito, ang time relay KT at ang coil KY ay konektado sa network, na nagkokonekta sa stator winding sa isang bituin gamit ang tatlong contact sa power circuit.
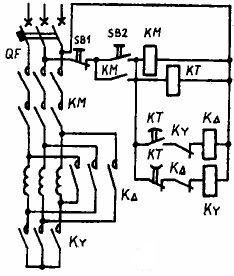
kanin. 3. Control circuit bilang isang function ng oras ng isang induction motor sa pamamagitan ng paglipat mula sa Y hanggang Δ
Ang motor ay nagsisimula at nagpapabilis sa pinababang boltahe. Pagkatapos ng paunang natukoy na agwat ng oras, pinapatay ng KT relay ang KY contactor at i-on ang coil ng KΔ contactor na kumukonekta sa stator winding sa delta. Dahil mayroong isang auxiliary contact KY sa circuit ng coil K∆, ang pagsasara ng contactor K∆ ay hindi maaaring mangyari bago ang pagsasara ng contactor KMY.
Ang sunud-sunod na pagsisimula ng multi-speed induction motors ay mas matipid at ginagawa bilang isang function ng oras.Isaalang-alang natin ang isang halimbawa ng isang hakbang-hakbang na pagsisimula ng isang dalawang-bilis na motor na may isang solong paikot-ikot (Larawan 4). Ang paikot-ikot na stator ay napupunta mula delta hanggang double star sa dobleng bilis.
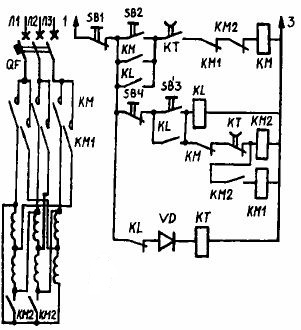
kanin. 4. Control circuit bilang isang function ng induction motor step start time
Ang motor ay inililipat ng contactor KM sa unang yugto ng bilis, at ng mga contactor na KM2 at KM1 sa pangalawa. Upang i-on ang motor sa unang bilis, ang pagpindot sa pindutan ng SB2 ay lumiliko sa coil ng contactor KM at ang kapangyarihan nito ay nakikipag-ugnay sa KM sa pangunahing circuit. Ang delta connected stator winding ay konektado sa network. Ang coil ng time relay KT ay pinalakas, at ang pagsasara ng contact nito (sa circuit ng coil KM) ay sarado.
 Ang isang hakbang-hakbang na pagsisimula ng makina sa pangalawang bilis ng pag-ikot ay isinasagawa gamit ang isang intermediate relay K, ang circuit na kung saan ay sarado ng start button SB3. Ang K na pagsasara ng mga contact ay lumalampas sa dalawang start button at ang K opening contact ay nag-de-energize sa KT time relay. Ang pagsasara ng contact KT sa circuit ng coil KM ay naka-off na may pagkaantala sa pagbabalik, dahil sa kung saan ang coil KM sa unang panahon ng pagsisimula ay lumabas na sarado at ang motor ay naka-on sa unang bilis.
Ang isang hakbang-hakbang na pagsisimula ng makina sa pangalawang bilis ng pag-ikot ay isinasagawa gamit ang isang intermediate relay K, ang circuit na kung saan ay sarado ng start button SB3. Ang K na pagsasara ng mga contact ay lumalampas sa dalawang start button at ang K opening contact ay nag-de-energize sa KT time relay. Ang pagsasara ng contact KT sa circuit ng coil KM ay naka-off na may pagkaantala sa pagbabalik, dahil sa kung saan ang coil KM sa unang panahon ng pagsisimula ay lumabas na sarado at ang motor ay naka-on sa unang bilis.
Ang contact ng KM block sa circuit ng coil KM2 at KM1 ay bubukas. Ang mga coil na ito ay hindi rin nakakonekta mula sa bukas na contact na KT, na naantala sa pagbabalik. Pagkatapos ng isang tiyak na tagal ng panahon, ang pagsasara ng contact na KT ay patayin ang coil KM, at ang pambungad na contact nito ay i-on ang mga coils ng mga contactor ng pangalawang bilis ng pag-ikot KM1 at KM2. Ililipat ng kanilang mga pangunahing contact sa supply circuit ang stator winding sa double star at ikonekta ito sa mga mains.
Samakatuwid, ang makina ay unang bumilis sa unang gear at pagkatapos ay awtomatikong lumipat sa pangalawang gear. Tandaan na ang paunang koneksyon ng stator winding sa isang double star at ang kasunod na pagsasama nito sa network ay isinasagawa muna sa pamamagitan ng pag-on sa dalawang pagsasara ng mga contact ng power supply KM2, at pagkatapos ay tatlong pagsasara ng pangunahing mga contact KM1. Ang ganitong pagkakasunud-sunod ng paglipat ay nakamit sa pamamagitan ng katotohanan na ang coil KM1 ay konektado sa boltahe sa pamamagitan ng contact ng closing block KM2. Ang makina ay huminto sa pamamagitan ng pagpindot sa «Stop» na buton, na minarkahan sa diagram na may letrang SB1.
Sa fig. Ang 5 ay nagpapakita ng isang diagram ng awtomatikong pagsisimula ng isang parallel-excited na DC motor bilang isang function ng oras. Sa pamamagitan ng pagsasara ng QF circuit breaker, ang motor ay handa para sa pagsisimula. Ang kasalukuyang dumadaloy sa circuit na binubuo ng winding ng time relay KT1, ang armature ng motor M at dalawang yugto ng panimulang rheostat R1 + R2.
kanin. 5. Control circuit bilang isang function ng oras ng isang excited DC motor
Dahil sa mataas na pagtutol ng coil ng relay KT1, ang kasalukuyang sa circuit na ito ay napakaliit at walang epekto sa motor, ngunit ang relay mismo ay na-trigger at ang bukas na contact nito sa circuit ng contactor KM1 ay bubukas. Sa coil ng pangalawang beses na relay KT2, konektado kahanay sa paglaban R1, tulad ng isang maliit na kasalukuyang ay branched na hindi ito maaaring i-on. Ang LM field winding ng motor ay naka-on din.
Ang motor ay sinisimulan sa pamamagitan ng pagpindot sa SB2 button. Kasabay nito, ang contactor KM at ang contact nito sa armature circuit ng motor ay naka-on. Ang malaking panimulang kasalukuyang ay nililimitahan ng dalawang yugto ng rheostat R1 at R2.Ang bahagi ng kasalukuyang ito ay sumasanga sa likid ng KT2 relay at kapag pinaandar ay binubuksan nito ang KT2 contact nito sa KM2 contactor circuit. Kasabay ng pagsasara ng armature circuit M, ang gumaganang contact ng contactor KM short-circuits ang coil ng relay KT1.
Pagkatapos ng isang tiyak na agwat ng oras kapag bumalik ang relay, isasara ng KT1 ang KT1 contact nito sa KM1 contactor circuit. Ang contactor na ito kasama ang gumaganang contact na KM1 ay mag-short-circuit sa unang yugto ng R1 ng panimulang rheostat at ang paikot-ikot ng time relay na KT2. Sa isang pagkaantala sa pagbabalik, ang mga gumaganang contact na KT2 ay i-on ang contactor na KM2, na kasama ng mga gumaganang contact na KM2 ay mag-short-circuit sa ikalawang yugto ng R2 ng panimulang rheostat. Kinukumpleto nito ang pagsisimula ng makina.
Kapag pinindot ang SB1 na buton, ang KM contactor ay babagsak at ididiskonekta ang pangunahing contact nito sa armature circuit. Ang armature ay nananatiling energized, ngunit ito ay lumiliko na ito ay konektado sa serye sa relay coil KT1, dahil sa kung saan ang isang maliit na kasalukuyang dumadaloy sa pamamagitan nito. Gumagana ang Relay KT1, buksan ang contact nito sa circuit ng mga contactor KM1 at KM2, i-off at bubuksan nila ang kanilang mga contact, short-circuit resistances R1 at R2. Ang motor ay titigil, ngunit ang field winding nito ay nananatiling konektado sa mga mains at sa gayon ang motor ay handa para sa susunod na pagsisimula. Ang kumpletong pagsasara ng makina ay ginagawa sa pamamagitan ng pag-off sa awtomatikong input switch BB.
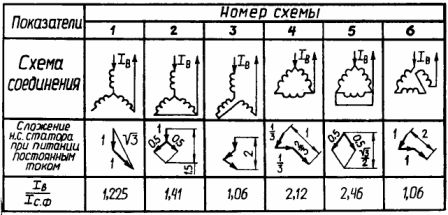
Ang dynamic na pagpepreno ng mga motor ay ginagawa rin bilang isang function ng oras. Para sa dynamic na pagpepreno, halimbawa, isang induction motor, ang stator winding ay naka-disconnect mula sa alternating current network at, ayon sa isa sa mga scheme na ipinapakita sa talahanayan 1, ay konektado sa isang direktang kasalukuyang pinagmulan.Sa industriya ng kagubatan at woodworking, ang direktang kasalukuyang ay nakuha mula sa mga espesyal na semiconductor rectifier. Sa kasong ito, hindi na kailangan ng isang espesyal na mapagkukunan ng direktang kasalukuyang.
Kapag ang stator winding ay naka-on ayon sa isa sa mga scheme (tingnan ang Talahanayan 1), ang isang nakatigil na magnetic field ay nilikha sa paikot-ikot sa rectifier. Sa isang nakatigil na field, ang rotor ng motor ay patuloy na umiikot sa pamamagitan ng inertia. Sa kasong ito, ang isang alternating EMF at kasalukuyang ay malilikha sa rotor ng motor, na magpapasigla sa isang alternating magnetic field. Ang pagbabago ng magnetic field ng rotor kapag nakikipag-ugnayan sa nakatigil na field ng stator ay lumilikha ng braking torque. Sa kasong ito, ang naka-imbak na kinetic energy mula sa rotor at ang drive ay na-convert sa elektrikal na enerhiya sa rotor circuits, at ang huli sa init.
Ang thermal energy ay nawawala mula sa rotor circuit patungo sa kapaligiran. Ang init na nabuo sa rotor ay magpapainit sa motor. Ang halaga ng init na inilabas ay depende sa kasalukuyang sa stator winding kapag ito ay ibinibigay ng direktang kasalukuyang. Depende sa scheme na pinagtibay para sa pag-on sa stator winding kapag ito ay ibinibigay ng direktang kasalukuyang, ang ratio ng kasalukuyang sa phase kasalukuyang ng stator ay magkakaiba. Ang mga ratio ng mga alon na ito para sa iba't ibang mga scheme ng paglipat ay ipinapakita sa isang talahanayan. 1
Ang dynamic na braking circuit ng isang induction motor ay ipinapakita sa fig. 6.
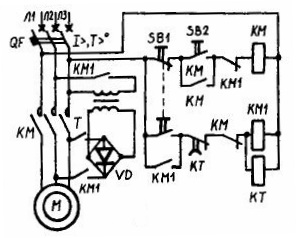
kanin. 6. Scheme ng dynamic na pagpepreno ng isang induction motor
Sa pamamagitan ng pagpindot sa start button na SB1, ini-on ng KM line contactor ang motor sa AC network, inililipat ng closing block contact nito ang KM coil sa self-powered.Ang pambungad na contact na KM ay dinidiskonekta ang supply circuit ng brake contactor KM1 at ang time relay na KT. Kapag pinindot ang SB button, ang KM line contactor ay de-energized at ang KM1 contactor coil circuit ay magiging energized.
Kasama sa Contactor KM1 ang mga contact nito na KM1 sa circuit ng transpormer T at rectifier V, bilang isang resulta kung saan ang stator winding ay ibibigay sa direktang kasalukuyang. Upang maiwasan ang random na independiyenteng paglipat ng contactor ng linya, ang pambungad na contact ng block KM1 ay konektado sa serye kasama ang coil KM nito. Kasabay ng brake contactor, ang time relay na KT ay naka-on, na naka-configure upang ang bukas na contact na KT ay gagana. patayin ang coil KM1 at ang time relay pagkatapos ng isang tiyak na agwat ng oras. Ang setting ng relay ng oras na KT ay pinili upang ang relay actuation time tkt ay katumbas ng kabuuan ng oras ng deceleration ng motor tT at ang tamang contactor KM1 tripping time.