Mga aparatong kontrol sa bilis ng makina
Ang mga asynchronous na de-koryenteng motor ay malawakang ginagamit sa mga countercurrent na circuit ng preno. induction speed control relay... Ang input shaft ng relay 5, kung saan naka-mount ang cylindrical permanent magnet 4, ay konektado sa shaft ng electric motor, ang angular na bilis nito ay dapat kontrolin.
Kapag ang de-koryenteng motor ay umiikot, ang magnetic field ay tumatawid sa mga wire ng short circuit 3 ng rotary stator 6. Ang isang EMF ay na-induce sa winding, ang halaga nito ay proporsyonal sa angular na bilis ng pag-ikot ng baras. Sa ilalim ng impluwensya nito, lumilitaw ang isang kasalukuyang sa likid at lumitaw ang isang puwersa ng pakikipag-ugnayan, na may posibilidad na paikutin ang stator 6 sa direksyon ng pag-ikot ng magnet.
Sa isang tiyak na bilis ng pag-ikot, ang puwersa ay tumataas nang labis na ang limiter 2, na nagtagumpay sa paglaban ng flat spring, ay nagpapalit ng mga contact ng relay. Ang relay ay nilagyan ng dalawang contact node: 1 at 7, na inililipat depende sa direksyon ng pag-ikot.
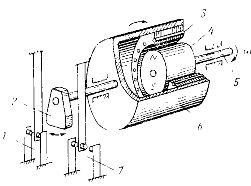
Figure 1. Inductive speed control relay
Ang isang induction speed control relay ay may medyo kumplikadong disenyo at mababang katumpakan na maaari lamang tanggapin para sa mga magaspang na sistema ng kontrol. Ang mas mataas na katumpakan ng regulasyon ng bilis ay maaaring makamit sa pamamagitan ng paggamit ng isang tachogenerator — isang pagsukat ng micro machine, ang boltahe sa mga terminal na kung saan ay direktang proporsyonal sa bilis ng pag-ikot.
Ang mga generator ng Tacho ay ginagamit sa mga sistema ng feedback ng variable speed drive na may malawak na hanay ng rpm at samakatuwid ay may error na ilang porsyento lamang. Ang pinakakaraniwan ay ang mga DC tachogenerator.
Sa fig. Ang 2 ay nagpapakita ng isang diagram ng isang speed control relay para sa isang de-koryenteng motor M gamit ang isang tachogenerator G, ang armature circuit kung saan kasama ang isang electromagnetic relay K at isang regulating rheostat R. Kapag ang boltahe sa mga armature terminal ng tachogenerator ay lumampas sa operating boltahe, ang relay ay naka-on sa panlabas na circuit.
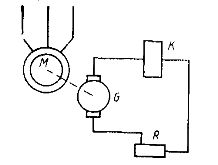
Figure 2. Speed control relay na may tachogenerator
 Figure 3. Schematic ng isang tachometer bridge
Figure 3. Schematic ng isang tachometer bridge
Habang tumataas ang resistensya ng armature circuit, tumataas ang katumpakan ng circuit. Samakatuwid, kung minsan ang relay ay konektado sa tachogenerator sa pamamagitan ng isang intermediate semiconductor amplifier. Posible rin na gumamit ng mga elemento ng semiconductor na non-contact threshold na may matatag na boltahe ng pagtugon para sa layuning ito.
Ang pagiging maaasahan ng circuit ay maaaring mapabuti kung ang DC tachogenerator ay papalitan ng isang contactless asynchronous tachogenerator.
Ang isang asynchronous tachogenerator ay may guwang na non-magnetic rotor na ginawa sa anyo ng salamin. Ang stator ay may dalawang windings sa isang anggulo ng 90 ° sa bawat isa. Ang isa sa mga coils ay konektado sa isang alternating kasalukuyang network.Ang isang sinusoidal na boltahe ay tinanggal mula sa iba pang paikot-ikot, na proporsyonal sa bilis ng rotor. Ang dalas ng output boltahe ay palaging katumbas ng dalas ng mga mains.
 Sa modernong DC Executive motors, ang tachogenerator ay itinayo sa parehong pabahay ng makina at naka-mount sa parehong baras bilang pangunahing motor. Binabawasan nito ang ripple ng boltahe ng output at pinapabuti ang katumpakan ng regulasyon ng bilis.
Sa modernong DC Executive motors, ang tachogenerator ay itinayo sa parehong pabahay ng makina at naka-mount sa parehong baras bilang pangunahing motor. Binabawasan nito ang ripple ng boltahe ng output at pinapabuti ang katumpakan ng regulasyon ng bilis.
Ang PT-1 type DC tachogenerators na may electromagnetic excitation ay karaniwang ginagamit sa PBST series electric motors. Mataas na metalikang kuwintas Mga DC motor Mayroon akong built in na permanenteng magnet na nasasabik na tacho.
Sa mga kaso kung saan ang DC motor M ay walang tachogenerator, ang bilis nito ay maaaring kontrolin sa pamamagitan ng pagsukat ng armature EMF. Para dito, ginagamit ang isang tachometric bridge circuit, na nabuo ng dalawang resistors: R1 at R2, armature Ri at karagdagang mga pole ng machine Rdp. Output boltahe ng tachometer bridge Uout = U1 — Udp, o
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Ang huling pagkakapantay-pantay ay may bisa sa ilalim ng kondisyon na ang magnetic flux ng electric motor ay pare-pareho. Kasama ang isang elemento ng threshold sa output ng tachometric bridge, ang isang relay ay nakuha na nakatakda sa isang tiyak na angular na bilis ng pag-ikot. Ang katumpakan ng tulay ng tachometer ay mababa dahil sa pagkakaiba-iba ng resistensya ng contact ng brush at ang kawalan ng timbang ng pag-init ng paglaban.
Kung ang DC motor ay gumagana sa isang artipisyal na katangian at ang isang malaking karagdagang pagtutol ay kasama sa armature, ang pagpapaandar ng bilis ng relay ay maaaring isagawa ng isang boltahe na relay na konektado sa mga terminal ng armature.
Boltahe sa armature ng de-koryenteng motor Uja = E + IjaRja.
Dahil I = (U — E) / (Ri + Rext), nakukuha namin ang Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, kung gayon ang pangalawang termino ay maaaring mapabayaan at ang boltahe ng terminal ng armature ay maaaring ituring na direktang proporsyonal sa emf at ang bilis ng pag-ikot ng motor.
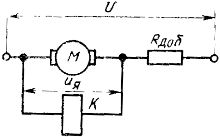
Figure 4. Kontrol ng bilis na may mga relay ng boltahe
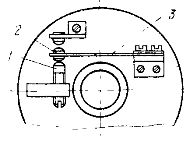 Figure 5. Centrifugal speed control relay
Figure 5. Centrifugal speed control relay
Mayroon silang napakasimpleng disenyo. centrifugal speed switch... Ang batayan ng relay ay isang plastic face plate 4, na naka-mount sa isang baras, ang bilis ng pag-ikot na dapat kontrolin. Ang isang flat spring 3 na may isang napakalaking movable contact 2 at isang fixed adjustable contact 1 ay naayos sa harap na plato. Ang spring ay gawa sa espesyal na bakal, ang modulus ng elasticity na halos hindi nakasalalay sa mga pagbabago sa temperatura.
Kapag umiikot ang face plate, kumikilos ang isang centrifugal force sa movable contact, na sa isang tiyak na bilis ng pag-ikot ay nagtagumpay sa paglaban ng flat spring at inililipat ang mga contact. Ang kasalukuyang ay ibinibigay sa contact device sa pamamagitan ng mga slip ring at brush, na hindi ipinapakita sa figure. Ang ganitong mga relay ay ginagamit sa mga sistema ng pagpapapanatag ng bilis para sa mga micromotor ng DC. Sa kabila ng pagiging simple nito, pinapanatili ng system ang bilis na may error sa pagkakasunud-sunod ng 2%.
