Conveyor drive chain
 Sinusuri ng artikulo ang mga scheme ng electrical drive ng ilang conveyor. Sa fig. Ang 1 ay nagpapakita ng isang diagram ng eskematiko ng electric drive ng mga indibidwal na linya ng conveyor, ang mga bilis nito ay dapat na mahigpit na pareho. Ang ganitong pangangailangan ay lumitaw sa patuloy na produksyon, kapag ang iba't ibang mga produkto, pagkatapos ng mga kinakailangang teknolohikal na operasyon sa magkahiwalay na linya, ay dapat matugunan sa lugar ng pagpupulong nang mahigpit na alinsunod sa bawat isa.
Sinusuri ng artikulo ang mga scheme ng electrical drive ng ilang conveyor. Sa fig. Ang 1 ay nagpapakita ng isang diagram ng eskematiko ng electric drive ng mga indibidwal na linya ng conveyor, ang mga bilis nito ay dapat na mahigpit na pareho. Ang ganitong pangangailangan ay lumitaw sa patuloy na produksyon, kapag ang iba't ibang mga produkto, pagkatapos ng mga kinakailangang teknolohikal na operasyon sa magkahiwalay na linya, ay dapat matugunan sa lugar ng pagpupulong nang mahigpit na alinsunod sa bawat isa.
Ang scheme ay nagbibigay-daan sa iyo upang sabay na simulan at ihinto ang ilang mga linya ng conveyor at ayusin ang kanilang bilis. Nakamit ang coordinated na paggalaw sa pamamagitan ng paglipat ng mga motor ayon sa synchronous shaft scheme na may karaniwang inverter frequency converter. Ang kontrol ng bilis ng mga motor D1 at D2 ay ginagawa sa pamamagitan ng pagbabago ng bilis ng inverter gamit ang isang variable ratio gearbox P.
Ang pahintulot upang simulan ang mga conveyor ay ibinibigay ng mga operator na sumusubaybay sa pagpapatakbo ng mga conveyor sa mga pinaka-kritikal na lugar. Kapag pinindot ang handa na mga pindutan G1 at G2, ang mga signal lamp na LS1 at LS2 ay iilaw at ang mga relay na RG1 at RG2 ay isinaaktibo. Ang huli ay naghahanda ng relay para sa pagsisimula ng RP.
Kapag pinindot mo ang Start button, ma-trigger ang RP, na mag-o-on sa contactor L1. Mayroong single-phase synchronization ng posisyon ng inverter, D1 at D2. Pagkatapos ng mga pagkaantala ng oras, ang mga pendulum relay na nakapaloob sa mga contactor na L1 at L2 ay halili na ino-on ang L2, i-off ang L1, at i-on ang LZ. Ang pagsisimula ng rheostat ng frequency converter motor ay isinasagawa ayon sa prinsipyo ng oras (time relays RU1, RU2, RUZ).
Sa fig. Ang 2 ay nagpapakita ng isang diagram ng electric drive ng subway escalator, na nagpapahintulot sa iyo na magtrabaho sa pagtaas at pagbaba ng mga pasahero. Ang isang asynchronous na motor na may isang phase rotor na may lakas na hanggang 200 kW ay ginagamit bilang isang drive motor. Sa ilang mga oras ng araw, na may hindi gaanong daloy ng mga pasahero, ang escalator ay maaaring gumana nang halos walang ginagawa nang mahabang panahon.
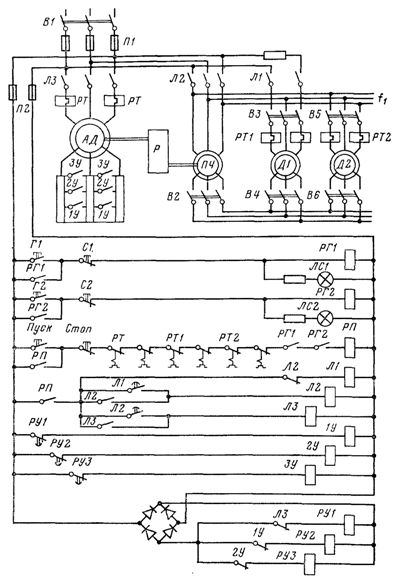
kanin. 1. Scheme ng electrical drive ng mga linya ng conveyor na may coordinated na paggalaw.
Upang mapataas ang power factor at kahusayan ng motor, kapag ang shaft load nito ay nabawasan sa humigit-kumulang 40% ng nominal, ang stator winding ay inililipat mula delta hanggang star. Habang tumataas ang load, lumiliko ito pabalik sa tatsulok.
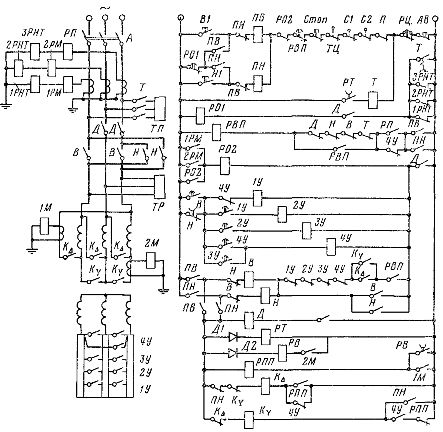
kanin. 2. Scheme ng electric drive ng subway escalator.
Ang nasabing paglipat ay awtomatikong ginagawa ng mga overcurrent na relay na 1M at 2M, na kumokontrol sa k∆ at kY contactors sa pamamagitan ng RPP at РВ relay. Tinitiyak ng opening delay RV contact ang pagkakaroon ng RPP coil circuit sa panahon sa pagitan ng 2M off at 1M on.
Sa generator descent mode na may buong load, ang makina ay na-load nang mas kaunti (dahil sa mekanikal na pagkalugi ng pag-install) kaysa sa isang katulad na pagkarga sa climb mode.Samakatuwid, sa droop mode, ang stator winding ng motor ay palaging nakakonekta sa bituin. Ang motor ay sinimulan bilang isang function ng oras gamit ang mga pendulum relay sa mga contactor ng accelerator 1U-4U. Ang paghinto ay mekanikal. Sa kasong ito, ang service brake TP ay naka-install sa motor shaft, at ang safety TP ay naka-install sa drive gear shaft upang matiyak na ang hagdan ay hihinto kung ang mekanikal na koneksyon sa pagitan ng gear at ang mga motor shaft ay nasira.
Ipinapatupad ng circuit ang karaniwang mga interlock sa kaligtasan na inilarawan sa nakaraang seksyon: mula sa isang malfunction ng mekanikal na bahagi ng kagamitan - pag-alis ng mga chain at handrails (limit switch TC, P), paglabag sa istraktura ng mga hakbang (limit switch C1 at C2 ), labis na temperatura ng mga bearings ( thermal relay 7), mula sa sobrang bilis (centrifugal speed relay RC).
Bilang karagdagan, ang proteksyon ng motor ay ibinigay: maximum (relay 1RM, 2RM), mula sa labis na karga (relay RP), mula sa pagkawala ng kapangyarihan mula sa motor (zero kasalukuyang relay 1RNT, 2RNT, 3RNT), mula sa hinang ng mga pagsasara ng mga contact ng mga contactor ng kuryente ( pagbubukas ng mga contact D, Y, B, T sa coil circuit RVP at 1U-4U sa coil circuit B).
Ang proteksyon laban sa pagkawala ng kuryente, bearing overheating at motor overload ay gumagana nang may time delay na tinutukoy ng time relay na PO1 at RVP. Ang lahat ng mga proteksyon, maliban sa remote control speed relay, ihinto ang motor sa pamamagitan ng pagdiskonekta nito mula sa mains at paglalapat ng TP service brake. Sa pagtatapos lamang ng proseso ng pagpepreno, pagkatapos mag-expire ang pagkaantala ng PT relay, ang safety brake TP ay ipapaandar din.Kapag ang RC speed relay ay pinaandar o ang emergency stop button ay pinindot, ang parehong mga preno ay inilapat nang sabay-sabay.