Isinara ang mga awtomatikong sistema ng kontrol
 Ang mga closed automatic control system (ACS) ay naiiba sa mga bukas na circuit sa kagamitang ginamit at sa pagiging kumpleto ng automation. Sa bukas na ACS, ang pangunahing unit (kabilang ang control equipment) ay hindi tumatanggap ng impormasyon tungkol sa aktwal na operating mode ng electrical installation (driving motor, running machine).
Ang mga closed automatic control system (ACS) ay naiiba sa mga bukas na circuit sa kagamitang ginamit at sa pagiging kumpleto ng automation. Sa bukas na ACS, ang pangunahing unit (kabilang ang control equipment) ay hindi tumatanggap ng impormasyon tungkol sa aktwal na operating mode ng electrical installation (driving motor, running machine).
Sa isang saradong ASUB, ang impormasyon ay ipinadala sa mga elemento ng kontrol, na sinamahan ng pagsusumite ng naaangkop na mga signal ng command. Ang circuit na nagpapadala ng naturang impormasyon ay nagsasara ng control loop, na bumubuo ng isang closed ACS o feedback ACS.
Ang pagkakaiba sa pagitan ng sarado at bukas na ACS ay maaaring ipaliwanag sa halimbawa ng pagkontrol sa bilis ng isang de-koryenteng motor sa isang generator-motor (G-D) system. Sa bukas na ACS (Larawan 1, a), ang itinakdang bilis ng de-koryenteng motor ay manu-manong itinakda ng potentiometer P. Ang pagsasaayos ng bilis ay isinasagawa nang biswal ng isang tachometer, na pinapagana ng TG tachogenerator. Ang anumang paglihis ng bilis mula sa setpoint ay inaalis ng operator sa pamamagitan ng pagkilos sa potentiometer slider.
Sa isang saradong ACS (Fig.1, b) ang armature ng TG tachogenerator ay kasama sa excitation circuit ng OVG generator, na lumilikha ng sarado o feedback system (sa kasong ito na may mabilis na feedback).
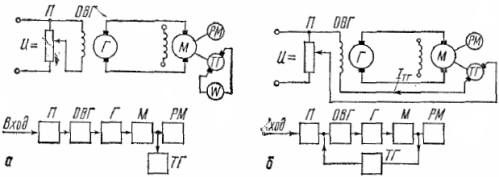
kanin. 1. Electric motor control circuit sa G -M system: a — open ACS, b — closed ACS
Ang kasalukuyang nabuo ng tachogenerator (Aztg) sa isang closed circuit na nakadirekta sa kasalukuyang ng potentiometer (Azn) at ang nagresultang kasalukuyang kumikilos sa circuit na katumbas ng geometric na pagkakaiba ng mga alon na ito. Gamit ang slider ng potentiometer, itinatakda ng operator ang halaga ng nagresultang kasalukuyang sa excitation coil ng OVG, kung saan ibinibigay ang kaukulang bilis ng motor na de koryente. Dito nagtatapos ang tungkulin ng operator. Sa hinaharap, awtomatikong pinapanatili ng system ang nakatakdang mode ng pagpapatakbo ng electric drive na may tiyak na katumpakan.
Ipagpalagay na bilang isang resulta ng pag-load ng spike, ang bilis ng de-koryenteng motor ay nabawasan kumpara sa tinukoy. Ang pagbawas sa bilis ay sinamahan ng isang kaukulang pagbawas sa bilis ng tachogenerator at ang boltahe sa mga terminal nito. Ito, sa turn, ay hahantong sa isang pagbawas sa kasalukuyang Aztg sa feedback circuit, at sa isang tiyak na posisyon ng slider ng potentiometer - isang pagtaas sa nagreresultang kasalukuyang sa paggulo ng winding ng generator. Ang boltahe ng generator at bilis ng motor ay tataas nang naaayon.
Ang proseso ng pagtaas ng bilis at boltahe ay magpapatuloy hanggang ang kasalukuyang sa feedback loop ay umabot sa itinakdang halaga at ang bilis ng motor ay umabot sa itinakdang halaga.
Sa pagsusuri ng mga awtomatikong sistema ng kontrol, mga function chart… Sa fig.2 transmissions functional scheme ng ACS, na kinabibilangan ng mga sumusunod na elemento:
1 — pangunahing aparato na nagtatakda ng mode ng operasyon, nagbibigay ng utos, simulan ang pulso o signal,
2 — elemento ng paghahambing. Kabilang dito ang signal X1 mula sa master, ang signal X0, na tumutukoy sa bilis o antas ng kinokontrol na halaga. Isinasaalang-alang ang signal mula sa ikasiyam na pangunahing elemento ng feedback, inihahambing ng elemento 2 ang mga natanggap na signal at ipinapadala ang karagdagang naitama na signal X2,
3 — ang elementong nagbabago, binabago ito ng signal op sa ibang anyo, mas maginhawa para sa karagdagang paghahatid. Halimbawa, ang signal X2 ay ibinibigay sa anyo ng haydroliko (pneumatic, mechanical) na presyon. Ang Elemento 3 ay nagko-convert nito sa isang electric current. Dahil ang ganitong uri ng pagbabago ay maaaring mangailangan ng karagdagang enerhiya, kung gayon ang elemento 3 ay konektado sa isang pinagmumulan ng enerhiya ng PE,
4 — pagdaragdag ng elemento, tumatanggap ito ng dalawang senyales: X3 at X8 mula sa elemento ng pagwawasto (elemento ng memorya) 8. Ang mga senyas na ito ay pinagsama-sama ng elemento 4 at ipinadala sa susunod na elemento,
5 — amplifying element, ang input signal X1 ay maaaring mahina at dapat na palakasin para sa kasunod na paghahatid. Ginagawa ito sa pamamagitan ng elemento 5 na konektado sa pinagmumulan ng kuryente ng PE,
6 - executive element, nagsasagawa ng natanggap na signal (electric motor, electromagnetic relay, servo motor),
7 — adjustable na bagay o gumaganang makina.
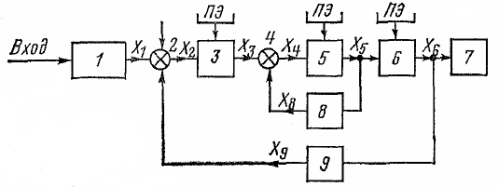
kanin. 2. Functional na diagram ng ACS
Ang bawat elemento ng automation ay isang converter ng enerhiya, sa input kung saan inilalapat ang halaga X', at ang halaga X ay inalis mula sa output. «Para sa bawat elemento sa isang nakatigil na estado mayroong isang tiyak na pag-asa X» (X'), na tinatawag na isang static na katangian.
Ang isang closed automatic control system ay nailalarawan sa pagkakaroon ng feedback; mayroon itong hindi bababa sa isang feedback loop na nagkokonekta sa output ng system sa input nito. Bilang karagdagan, maaaring mayroong tinatawag na panloob na feedback, na nagkokonekta sa output at input ng mga indibidwal na elemento ng ACS.
Ang feedback ay nahahati sa mahirap at flexible. Ang mga mahihirap na hadlang ay gumagana kapwa sa lumilipas at nakatigil na mga mode ng pagpapatakbo ng system, nababaluktot — sa mga lumilipas lamang. Ibahin ang pagitan ng positibo at negatibong feedback. Habang tumataas ang kinokontrol na halaga, ang positibong koneksyon ay nagpapataas pa nito, at ang negatibo, sa kabaligtaran, ay bumababa. Ang mga feedback ay maaaring magpadala ng mga signal na proporsyonal sa anggulo ng pag-ikot, bilis, boltahe, kasalukuyang, atbp. at tinatawag na anggulo, bilis, boltahe, kasalukuyang mga feedback nang naaayon. Para sa higit pang mga detalye tingnan dito: Mga elemento ng mga sistema ng automation
Ayon sa prinsipyo ng pagpapatakbo, ang ACS ay maaaring nahahati sa tatlong grupo:
-
patuloy na operasyon kung saan ang ugnayan sa pagitan ng kinokontrol at itinakda na mga halaga ay hindi nasira,
-
pagkilos ng salpok, kung saan ang koneksyon sa pagitan ng kinokontrol at mga itinakdang halaga ay nagaganap sa mga regular na agwat,
-
relay action kung saan ang komunikasyon ay nangyayari lamang kapag ang isang halaga ay umabot sa isang tiyak na halaga.
Depende sa batas kung saan nagbabago ang isang naibigay na halaga sa paglipas ng panahon, ang ACS ay maaari ding hatiin sa tatlong grupo:
-
pare-pareho o mababang setpoint system kung saan ang awtomatikong kinokontrol na halaga ay pinananatiling pare-pareho. Ang mga ito ay mga stabilization system, na kung saan ay mga automatic control system (ACS),
-
mga sistema kung saan binago ang target na halaga ayon sa isang tiyak, paunang natukoy na programa. Ito ay isang sistema ng pamamahala ng software,
-
mga sistema kung saan ang isang ibinigay na halaga ay maaaring mag-iba nang malawak at ayon sa isang arbitrary na batas, i.e. mga sistema ng pagsubaybay.