Electric drive ng electric hoists at crane beam
 Ang mga suspendidong electric trolley (electrified hoists, hoists at crane beam) ay ginagamit upang buhatin at ilipat ang mga karga at bahagi ng makina sa panahon ng pagpupulong at pagkukumpuni sa mga pang-industriyang lugar. Ang mga electric hoist, hoist at crane ay mas maliit kaysa sa mga bridge crane, na nagpapababa sa laki ng mga pang-industriyang gusali at ang kanilang pagpapanatili ay hindi nangangailangan ng mga kwalipikadong tauhan.
Ang mga suspendidong electric trolley (electrified hoists, hoists at crane beam) ay ginagamit upang buhatin at ilipat ang mga karga at bahagi ng makina sa panahon ng pagpupulong at pagkukumpuni sa mga pang-industriyang lugar. Ang mga electric hoist, hoist at crane ay mas maliit kaysa sa mga bridge crane, na nagpapababa sa laki ng mga pang-industriyang gusali at ang kanilang pagpapanatili ay hindi nangangailangan ng mga kwalipikadong tauhan.
Ang mga suspendidong electric trolley ay idinisenyo para sa pagbubuhat at paglipat ng mga produkto sa mga pasilidad ng produksyon sa isang mahigpit na tinukoy na landas.
Ang isang de-koryenteng trak (Larawan 1) ay binubuo ng 3 pangunahing bahagi: isang mekanismo ng pag-angat (electric hoist) na idinisenyo upang iangat (pababa) at hawakan ang karga, isang mekanismo ng paggalaw (undercarriage) na idinisenyo upang ilipat ang itinaas na karga sa isang mahigpit na tinukoy na direksyon ng posisyon , isang monorail na tumutukoy sa pahalang na paggalaw sa dalawang direksyon.
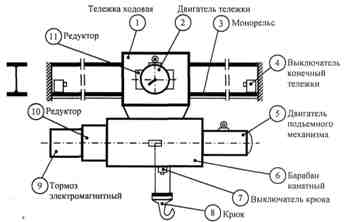
kanin. 1. Kinematic diagram ng suspendido na electric carriage
Ang electric hoist ay naka-mount sa isang gumaganang trolley at kasama ang mga sumusunod na kagamitan: de-koryenteng motor (5) ng mekanismo ng pag-aangat, cylindrical gearbox (10) para sa pagbabawas ng bilis ng pag-ikot ng de-koryenteng motor sa isang halaga na nagbibigay ng isang naibigay na linear na bilis ng pag-aangat (pagbaba) ng hook, electromagnetic brake (9), upang ihinto ang motor ng baras kapag ito ay naka-disconnect mula sa mains o nawala ang boltahe sa network, ang isang braking brake ay isinaaktibo, na kumikilos sa puwersa ng mga bukal, kapag ang mga shaft ay nakabalot sa baras, ang limit switch (7) ng hook, upang limitahan ang pag-angat ng hook, kapag pinindot, ang engine ay hindi nakakonekta mula sa network at bumagal, ang rope drum (6), para sa paikot-ikot ( pag-unwinding) at pag-iimbak ng lubid, ang kawit (8), para sa pag-secure ng nakataas na load .
Ang undercarriage ay naka-mount sa monorail (3), na sinusuportahan ng mga tumatakbong gulong sa ibabang flanges ng double rail. Pagmamaneho ng mga gulong sa pamamagitan ng cylindrical gearbox (11) sa pamamagitan ng electric motor (2).
Monorail — I -beam na may mga switch ng limitasyon (4) sa mga dulo upang limitahan ang pahalang na paggalaw.
Ang electric hoist TEP-1 (load capacity 1 t, boltahe 380 V) ay binubuo ng lifting at moving mechanisms na may indibidwal na electric drive. Ang gumaganang drum 2 ay hinihimok ng engine 20 sa pamamagitan ng isang planetary gearbox na binubuo ng mga satellite 5, 7, 8, block gears 13, sun gears 6, 9, carrier 14, 15. Ang pangunahing drive shaft 4 kapag naka-off ang engine ay huminto sa pamamagitan ng mga disc 10 sa ilalim ng pagkilos ng tagsibol 11.
Upang himukin ang mekanismo ng pag-aangat sa bilis na 6.5-6.9 m / s, ginagamit ang isang asynchronous na motor na may tumaas na slip ng uri ng AOS-32-4M (power 1.4 kW sa 1320 rpm at duty cycle = 25%).Ang pataas na paggalaw ng hook ay nililimitahan ng limit switch.
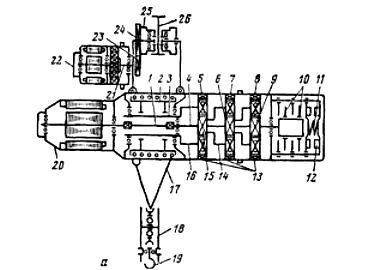
kanin. 2. Electric drive ng electric hoist TEP -1: 1 — working drum, 3 — hollow shaft, 4 — working shaft, 5, 7, 8 — satellite, 6, 9, 15 — sun gears, 10 — brake disc, 11 — spring ng preno, 12 — electromagnets, 13 — block gears, 14, 16, 21 — carrier, 17 — cable, 18 — suspension, 19 — hook, 20 — electric motor para sa pag-angat ng load, 22 — trolley electric motor, 23, 24 - gears, 25 - roller, 26 - monorail.
Ipinapakita ng Figure 3 ang operasyon ng hoist. Ang kahusayan ng electric hoist ay tumataas sa 0.58 habang ang mass ng lifted load ay tumataas sa 1000 kg.
Kagiliw-giliw na mode ng pagpapatakbo ng motor 4 kapag binababa ang load: habang ang bigat ng load ay mas mababa sa 425 kg, ang electric motor ay gumagana sa motor mode, at kapag ang masa ay higit sa 425 kg - sa generator mode. Samakatuwid, upang mapagtagumpayan ang idle moment ng mekanismo ng pag-aangat, sapat na ang isang load na tumitimbang ng 425 kg.
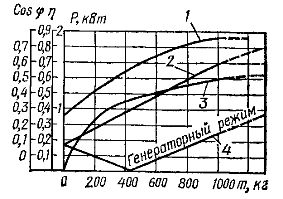
kanin. 3. Mga katangian ng pagpapatakbo ng isang electric hoist: 1 — ssphi ng de-koryenteng motor, 2 — ang lakas ng de-koryenteng motor kapag nag-aangat ng karga, 3 — kahusayan, 4 — ang lakas ng de-koryenteng motor kapag ibinababa ang karga.
Upang himukin ang undercarriage ng electric hoist, isang asynchronous electric motor 22 (Fig. 2) ng uri ng TEM-0.25 (power 0.25 kW sa 1410 rpm at duty cycle = 25%) na may built-in na planetary single-stage gearbox at gear 23, 24, pagpapadala ng pag-ikot ng mga roller 25. Ang mga braking device ay hindi naka-mount sa mga mekanismo ng paggalaw ng pinakasimpleng hoists. Ang paggalaw ng hoist sa kahabaan ng beam sa parehong direksyon ay limitado sa pamamagitan ng mekanikal na paghinto.
 Ang isang jib crane ay naiiba sa isang hoist dahil ang sinag kung saan ang hoist ay naglalakbay ay maaaring gumalaw sa paligid ng production room, na hinimok ng isang squirrel-cage o phase rotor electric motor. Ang tulay ng crane beam, na mayroong mekanismo ng electric drive, ay ginawa sa anyo ng isang solong beam kung saan gumagalaw ang electric undercarriage.
Ang isang jib crane ay naiiba sa isang hoist dahil ang sinag kung saan ang hoist ay naglalakbay ay maaaring gumalaw sa paligid ng production room, na hinimok ng isang squirrel-cage o phase rotor electric motor. Ang tulay ng crane beam, na mayroong mekanismo ng electric drive, ay ginawa sa anyo ng isang solong beam kung saan gumagalaw ang electric undercarriage.
Ang mga three-phase asynchronous na motor na may rotor ng squirrel-cage ay ginagamit upang magmaneho ng mga outboard na de-kuryenteng sasakyan at lamang na may mataas na kapasidad ng pagkarga at ang pangangailangan para sa regulasyon ng bilis at makinis na "landing" ng mga load-asynchronous na motor na may isang phase rotor.
Dahil sa kakulangan ng mababang bilis na kinakailangan para sa maayos na paglapag ng mga kargada o tumpak na paghinto ng kreyn, dapat na pana-panahong i-on at patayin ng manggagawa ang mga de-koryenteng motor, at pinapataas nito ang bilang ng mga pagsisimula at nagiging sanhi ng pag-init ng mga windings, at binabawasan din ang wear resistance ng mga contact. Samakatuwid, sa ilang mga crane mayroong mga electric drive para sa pag-angat at paglalakbay na may dalawang bilis ng pagpapatakbo: nominal at nabawasan, na ibinibigay sa pamamagitan ng paggamit ng dalawang-bilis na asynchronous na motor sa halip na single-speed o isang karagdagang micro drive.
 Ang mababang bilis (0.2 — 0.5 m / s) na sinuspinde na mga electric trolley na pinapagana ng mga squirrel-cage na motor ay karaniwang kinokontrol mula sa sahig (lupa) na antas gamit ang nakasuspinde mga istasyon ng push button… Sa mga air trolley at crane na may cabin para sa operator (sa bilis na 0.8 — 1.5 m / s), ang mga motor na may phase rotor ay kinokontrol ng mga controllers.
Ang mababang bilis (0.2 — 0.5 m / s) na sinuspinde na mga electric trolley na pinapagana ng mga squirrel-cage na motor ay karaniwang kinokontrol mula sa sahig (lupa) na antas gamit ang nakasuspinde mga istasyon ng push button… Sa mga air trolley at crane na may cabin para sa operator (sa bilis na 0.8 — 1.5 m / s), ang mga motor na may phase rotor ay kinokontrol ng mga controllers.
Ang mga de-koryenteng motor ng hoists at overhead crane ay kinokontrol ng nababaligtad na mga magnetic starter at mga pindutan ng pagsisimula na sinuspinde mula sa isang nababaluktot na armored cable.Ang boltahe sa mga coils at contact ng mga contactor para sa pagtaas ng KM1 (Fig. 4), pagpapababa ng KM2, paglipat ng KMZ pasulong at paatras na KM4 ay ibinibigay sa pamamagitan ng isang circuit breaker at isang cable o contact wire. Ang pataas na paggalaw ng lifting device ay limitado ng limit switch. SQ.
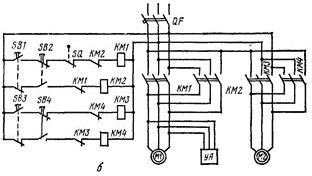
kanin. 4. Electric schematic diagram ng crane-beam
Ang pagharang sa mga pag-reverse ng mga contactor ng mga motor mula sa sabay-sabay na pag-on ay isinasagawa sa pamamagitan ng mga double circuit button at mekanikal na pagharang ng mga contactor mismo (o pagbubukas ng mga auxiliary contact ng mga contactor).
Sa mga electric hoist at overhead crane, ang mga start button ay hindi nalalampasan ng kaukulang pagsasara ng contactor interlock contact, na pumipigil sa hoist na magpatuloy sa paggana pagkatapos bitawan ng operator ang push button pendant station. Kasabay ng nakakataas na motor, ang UA solenoid ay pinaandar, na nagbubukas ng preno.
Ang maximum na pinahihintulutang oras ng pagsisimula para sa mga mekanismo ng pag-aangat ay 3 — 5 s, para sa mga mekanismo ng paggalaw - 10 — 15 s.
Maaari mo ring makita ang: Mga kagamitang elektrikal at kadena ng mga electric hoist
Ang mode ng pagpapatakbo ng mga makina ng mga electric truck, electric hoists at overhead cranes ay depende sa kanilang layunin. Kung ang mga kalakal ay inilipat sa mga bridge crane sa maikling distansya, kung gayon ang mga makina ay gumagana sa isang kahiya-hiyang panandaliang mode (halimbawa, sa mga troli na naghahatid ng mga seksyon ng mga workshop o bodega).

Para sa mga overhead crane na nagdadala ng mga kalakal sa teritoryo ng planta sa medyo malalayong distansya, ang mga operating mode ng lifting at moving motors ay iba: ang una ay nailalarawan sa pamamagitan ng isang panandaliang mode, ang pangalawa ay isang pangmatagalang mode. ng mga motor para sa pag-angat at paglipat ng mga electric hoist, hoists at gantry crane ay tinutukoy sa parehong paraan tulad ng para sa mga makina ng mga mekanismo ng overhead crane.