Mga non-contact sensor para sa posisyon ng mga mekanismo
 Sa artikulong ito ay pag-uusapan natin ang tungkol sa mga sensor ng posisyon ng mga mekanismo. Karaniwan, ang pangunahing pag-andar ng anumang sensor ay upang magbigay ng isang senyas kapag naganap ang isang partikular na kaganapan. Iyon ay, kapag naganap ang isang kaganapan sa pag-trigger, ang sensor ay isinaaktibo at bumubuo ng isang signal, na maaaring analog o discrete, digital.
Sa artikulong ito ay pag-uusapan natin ang tungkol sa mga sensor ng posisyon ng mga mekanismo. Karaniwan, ang pangunahing pag-andar ng anumang sensor ay upang magbigay ng isang senyas kapag naganap ang isang partikular na kaganapan. Iyon ay, kapag naganap ang isang kaganapan sa pag-trigger, ang sensor ay isinaaktibo at bumubuo ng isang signal, na maaaring analog o discrete, digital.
Ang mga sensor ng limitasyon ay ginamit bilang mga sensor ng posisyon sa loob ng maraming dekada. switch. Binubuo ang mga ito ng mga de-koryenteng contact na mekanikal na nagbubukas o nagsasara kapag ang ilang variable (posisyon) ay umabot sa isang tiyak na halaga. Ang mga switch ng limitasyon ng iba't ibang uri ay isang mahalagang bahagi ng maraming mga control system, ang pagiging maaasahan nito ay nakasalalay sa kanila. ang mga naturang sensor ay naglalaman ng mga gumagalaw na elementong mekanikal na ang mga mapagkukunan ay limitado.
Ang mga switch ng limitasyon ay kasalukuyang aktibong pinapalitan ng iba't ibang proximity sensor. Kadalasan ang mga proximity sensor ng mga sumusunod na uri: inductive, generator, magnetohercon at photoelectronic. Ang mga sensor na ito ay walang mekanikal na kontak sa gumagalaw na bagay na ang posisyon ay sinusubaybayan.
Tinitiyak ng mga non-contact position sensor ang mataas na bilis at mataas na dalas ng paglipat sa mekanismo. Ang isang tiyak na kawalan ng mga sensor na ito ay ang pagtitiwala, ang kanilang katumpakan, sa mga pagbabago sa supply boltahe at temperatura. Depende sa mga kinakailangan, ang output device ng mga device na ito ay maaaring ang mga sumusunod contactless logic elementoat relay ng kuryente.
Sa precision braking scheme ng mga electric drive, ang mga proximity sensor ay maaaring gamitin kapwa upang mag-utos ng downshift at isang huling paghinto.
Mayroong maraming mga uri ng mga sensor sa merkado ngayon, ngunit sa loob ng balangkas ng artikulong ito ay i-highlight namin ang paksa na direktang inductive na mga sensor ng posisyon, dahil sa higit sa 80% ng mga kaso ito ay mga inductive sensor na nagsisilbing mga sensor para sa posisyon ng mga mekanismo.
Ang inductive sensor ay na-trigger kapag ang metal ay lumalapit sa trigger zone nito. Para sa kadahilanang ito, ang mga inductive position sensor ay tinatawag ding mga presence sensor, proximity sensor, o simpleng inductive switch.
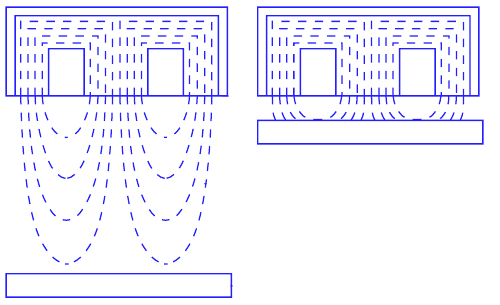
Isaalang-alang natin ngayon ang prinsipyo ng pagpapatakbo ng isang inductive sensor. Tulad ng nabanggit sa itaas, kapag ang metal ay sapat na malapit sa trigger zone, ang sensor ay isinaaktibo. Ang kababalaghang ito ay binubuo sa pakikipag-ugnayan ng kasangkot inductors na may metal na papalapit dito, na masakit na nagbabago sa magnitude ng magnetic field ng coil, na humahantong sa pag-activate ng sensor, ito ay na-trigger, ang kaukulang signal ay lilitaw sa output nito.
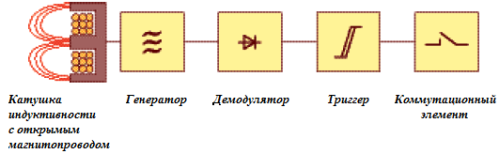
Ang elektronikong bahagi ng aparato ay naglalaman ng isang control circuit, na kung saan ay kumokontrol sa isang relay o transistor switch. Binubuo ito ng mga sumusunod na bahagi:
-
Isang generator na lumilikha ng isang electromagnetic field na kailangan upang makipag-ugnayan sa isang bagay.
-
Schmitt trigger na nagbibigay ng switching hysteresis.
-
Isang amplifier upang mapataas ang amplitude ng signal upang maabot nito ang kinakailangang halaga ng actuation.
-
LED indicator na nagpapaalam tungkol sa status ng switch. Nagbibigay din ito ng pagsubaybay sa pagganap at pagsasaayos.
-
Compound upang maprotektahan laban sa pagtagos ng solid particle at tubig.
-
Housing para sa pag-mount ng sensor at proteksyon mula sa iba't ibang mekanikal na impluwensya. Ito ay gawa sa tanso o polyamide at may mga fastener.
Ang mga inductive position sensor ay malawakang ginagamit sa mga sistema ng automation ng industriya kung saan kinakailangan na pana-panahon o patuloy na matukoy ang posisyon ng anumang bahagi ng mekanismo. Ang sensor ay bumubuo ng isang signal na ipinadala sa drive. Ang isang starter, controller, relay, frequency converter, atbp. ay maaaring kumilos bilang isang executive mechanism. Ang pangunahing bagay ay ang mga parameter ng sensor ay tumutugma sa mga parameter ng drive sa mga tuntunin ng boltahe at kasalukuyang.
Karamihan sa mga sensor ay hindi mga power device, ang mga ito ay pangunahing mga signaling device, samakatuwid ang sensor mismo, bilang panuntunan, ay hindi nagpapalipat-lipat ng anumang makapangyarihan, ngunit kumokontrol lamang, nagbibigay ng control signal, nagsisilbing isang action initiation device na maaari nang konektado. sa pagpapalit ng kuryente.
Ang mga modernong inductive position sensor ay kadalasang matatagpuan sa dalawang bersyon ng plastic o metal housings: rectangular o cylindrical. Ang diameter ng sensor na may isang circular cross-section ay maaaring mula 4 hanggang 30 mm, ngunit ang pinakakaraniwang ginagamit na mga diameter ay 18 at 12 mm.
Kapag ang sensor ay naka-mount sa kagamitan, ang isang puwang ay itinakda sa pagitan ng metal plate at ang actuation zone ng sensor, kadalasan ang distansya na ito ay hindi lalampas sa diameter ng sensor at, bilang isang panuntunan, ito ay lumalabas na 2-3 beses na mas maliit kaysa sa diameter nito.
Ayon sa paraan ng koneksyon, ang mga inductive position sensor ay maaaring dalawang-wire, tatlong-wire, apat na-wire at limang-wire.
Dalawang-wire na direktang lumipat sa pagkarga, tulad ng starter coil, iyon ay, gumagana ang mga ito tulad ng isang maginoo na switch. Ang mga sensor ng dalawang-wire ay nangangailangan ng paglaban sa pag-load, kaya hindi sila palaging angkop bilang isang maaasahang tool, ngunit hindi nila nawawala ang kanilang kaugnayan.
Ang pag-load ay konektado lamang sa serye sa sensor, kung ang pare-pareho ang boltahe ay ginagamit pagkatapos ay mahalaga na obserbahan ang polarity, kung ang alternating polarity ay hindi mahalaga, ang pangunahing bagay ay ang inililipat na kapangyarihan at kasalukuyang.
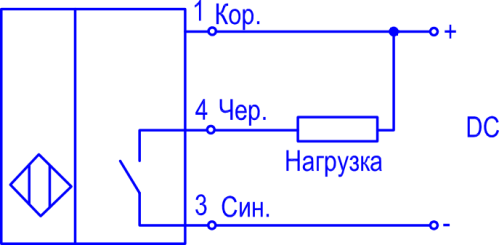
Ang mga three-wire sensor ay may pangatlong wire na magpapagana sa sensor mismo, at ito ang pinakasikat na solusyon. Ang mga four-wire at five-wire sensor ay may mga transistor o relay na output para sa pagkonekta sa load, at ang ikalimang wire ay nagpapahintulot sa iyo na piliin ang operating mode ng sensor, ang paunang estado ng mga output.
Dahil ang mga output ay maaaring parehong relay at transistor, ang mga sensor ay nahahati sa tatlong uri ayon sa aparato ng mga output: relay, npn at pnp.
Mga sensor na may output ng relay
Ang isang sensor na may output ng relay ay may galvanic na paghihiwalay ng supply circuit mula sa kasamang circuit. Pinapalitan nito ang isang wire at ang boltahe sa switched circuit ay hindi partikular na kritikal. Dahil ang power supply circuit ng sensor ay galvanically isolated, ito ay maaaring ituring na isang bentahe ng relay sensor. Ang mga sensor ng ganitong uri ay kadalasang malaki.
Mga sensor na may pnp transistor output
Ang sensor ay may pnp transistor sa output na nagpapa-commutate sa positive wire sa load. Ang isang load ay konektado sa collector circuit ng output pnp transistor, na permanenteng konektado sa negatibo sa pamamagitan ng pangalawang lead nito.
Mga sensor na may npn transistor output
Ang sensor ay may NPN transistor sa output na nagpapalit ng negatibong wire sa load. Ang isang load ay konektado sa collector circuit ng output npn transistor, na permanenteng konektado ng pangalawang lead nito sa positive lead.
Ayon sa paunang estado ng mga output, ang mga inductive position sensor ay maaaring normal na sarado o karaniwang bukas na mga contact. Ang paunang estado ay nangangahulugan na ang estado na ito ay sa sandaling ang sensor ay hindi pa na-trigger, iyon ay, hindi ito aktibo.
Kung ang mga output contact ay karaniwang sarado, pagkatapos ay ang load ay konektado sa idle time, kung ito ay normal na bukas, pagkatapos ay hanggang sa ang sensor ay na-trigger, ang load ay mapuputol at walang kapangyarihan na ibibigay sa drive (hal. contactor). Ang karaniwang mga closed contact ay itinalaga sa English na format — N.C. (Normally Closed), Normally Open — N.O. (Karaniwang bukas).
Kaya, ang mga sensor na may mga output ng transistor ay may apat na uri: dalawang uri ayon sa kondaktibiti (pnp o npn) at dalawang uri ayon sa paunang estado ng mga output. Maaari ding magkaroon ng pagkaantala kapag nag-on o nag-o-off.

Depende sa uri ng drive na nakakonekta sa sensor, pati na rin sa paraan ng power supply, ang logic ng sensor ay maaaring positibo o negatibo. Ito ay dahil sa antas ng boltahe na nagpapagana sa input ng device.
Kung ang input ay isinaaktibo kapag ang negatibong wire ng actuator ay konektado sa lupa, sa minus, kung gayon ang lohika ay tinatawag na negatibo, ang gayong koneksyon ay katangian ng mga sensor na may mga npn type transistor output.
Ang positibong logic ay tumutugma sa pagkonekta sa positibong wire ng drive sa positibong power supply kapag na-activate, ang logic na ito ay tipikal ng mga sensor na may mga pnp transistor output. Kadalasan, mayroong positibong lohika sa pagpapatakbo ng mga inductive sensor para sa posisyon ng mga mekanismo.
Mas lumang pinakakaraniwang ginagamit na mga uri ng inductive position sensor
Inductive position sensors IKV-22
Mga inductive sensor IKV-22. Ang pagpapatakbo ng mga sensor na ito ay batay sa prinsipyo ng pagbabago ng inductive resistance ng mga coils na may bakal na core kapag ang air gap sa magnetic circuit ay nagbabago.
Ang isang magnetic circuit na may dalawang coils ay naka-mount sa isang steel plate, sarado na may isang plastic cover. Dalawang MBGP capacitor (isa na may kapasidad na 15 μF, 200 V, ang isa na may kapasidad na 10 μF, 400 V) ay nakakabit sa plato mula sa ilalim na bahagi. Ang mga capacitor ay natatakpan ng isang takip. Ang cable ay konektado sa pamamagitan ng selyo. Ang isang magnetic shunt ay naka-install sa mekanismo, ang mga sukat nito ay dapat na hindi bababa sa: kapal 2 mm, lapad 80 mm, haba 140 mm. Ang air gap sa pagitan ng magnetic circuit at ng shunt ay 6 ± 4 mm.
Ang output relay ay karaniwang naka-on at off sa sandaling ang magnetic shunt ay dumaan sa sensor, kapag dahil sa isang pagbabago sa inductive resistance ng coil, ang kasalukuyang resonance ay nangyayari at ang kasalukuyang sa pamamagitan ng relay coil ay bumaba. Ang mga relay na ito: uri ng MKU-48, 12 V AC, gumuhit ng kasalukuyang hindi hihigit sa 0.45 A, bumaba ang kasalukuyang hindi bababa sa 0.1 A.Ang supply boltahe ng sensor circuit ay 24 V AC relay.
Mga inductive position sensor ID-5
Sa mga workshop ng metalurhiko, ginagamit ang mga inductive sensor ng uri ng ID-5, na idinisenyo upang gumana sa ambient na temperatura hanggang sa + 80 ° C at halumigmig hanggang sa 100%. Ang conductive dust at scale ay katanggap-tanggap. Ang isang uri ng UID-10 semiconductor output amplifier ay ginagamit kasama ng sensor. Ang output power ng amplifier (25 W) ay sapat na upang i-on ang laganap na REV-800 relay, contactors KP21, MK-1, atbp.
Ang air gap sa pagitan ng sensor at ng naobserbahang ferromagnetic object ay maaaring hanggang 30 mm. Ang mga sukat ng sensor ng ID-5 ay 187x170x70 mm, ang supply boltahe ay 220 V ± 15%, 50 Hz.
Maliit na laki ng BSP contactless switch
Ang mga small motion switch na BSP-2 (na may non-contact na output, sa logic element) at BRP (na may output para i-relay ang PE-21, 24 V, 16 Ohm) ay ginagamit sa mga metal cutting machine.
Ang BSP-2 switch ay binubuo ng isang differential transformer sensor at isang semiconductor trigger. Ang magnetic system ng unang sensor coil ay ginagalaw ng isang steel plate, at ang pangalawang coil ay minamanipula habang ito ay gumagalaw sa ibabaw ng magnetic system nito na konektado sa flat armature mechanism. Ang mga coils ay nakabukas sa tapat na direksyon.
Kung ang armature ay nasa itaas ng sensor, ang inductive reactances ng mga coils ay pantay at ang output ng sensor ng differential transformer ay zero. Sa kasong ito, lumilitaw ang isang boltahe ng hindi bababa sa 2.5 V sa output ng trigger, na sapat para gumana ang elemento ng lohika.
Sa kawalan ng isang armature sa itaas ng sensor, ang isang boltahe ay inilalapat sa trigger, na ibabalik ito sa orihinal na estado nito. Pagkatapos ang output signal ng switch ay zero.
Ang prinsipyo ng pagpapatakbo ng switch ng BRP sa maraming paraan ay katulad ng sa BSP-2. Ang isang inductive sensor (ayon sa circuit ng differential transformer), isang trigger at isang amplifier ay naka-install sa loob ng kahon. Ang mga pangalawang coil na may ibang bilang ng mga pagliko ay inililipat sa kabaligtaran na direksyon. Habang nagpapatong ang armature sa magnetic system ng sensor, bumababa ang signal at pagkatapos baguhin ang phase, ang trigger ay inililipat at isang panlabas na output relay (PE-21, 24 V, 16 Ohm) ay naisaaktibo.
Ang anchor na naayos sa mekanismo ay may mga sukat na 80x15x3 mm. Ang agwat sa pagitan ng anchor at ng sensor ay 4 mm. Ang katumpakan ng mga switch sa nominal mode ay ± 0.5 mm, ang actuation differential ay hindi hihigit sa 5 mm. Sa. pagbabagu-bago sa supply boltahe at temperatura, ang error ng BSP-2 at BRP switch ay maaaring umabot sa ± (2.5-f-3.0) mm.
High frequency inductive sensors VKB
Ang mga high-precision inductive sensor ng uri ng VKB na may hugis-U o flat armature ay ginagamit din para sa automation ng mga metal cutting machine. Ang mga pole ng built-in na transpormer ay bumubuo ng isang bukas na electromagnetic system. Ang working air gap ay 0.1-0.15 mm.
Ang output boltahe mula sa pangalawang paikot-ikot ng transpormer ay pinapakain sa isang circuit ng pagsukat ng kaugalian at pagkatapos ay sa isang transistor amplifier. Ang kabuuang error ng sensor na may mga pagbabago sa temperatura mula 5 hanggang 40 ° C at boltahe mula 85 hanggang 110% ng nominal na halaga ay ± (0.064-0.15) mm, ang pagkakaiba sa tugon ay hindi lalampas sa 0.4 mm. Ang maximum na bilis ng paggalaw ng mekanismo ay 10 m / mm. Mga sukat ng sensor 62x34x24 mm. Supply boltahe 12 V.
Ang mga espesyal na uri ng precision inductive sensor para sa mga metal cutting machine na may differential circuit ay may error na mas mababa sa ± 0.01 mm.Kasama sa mga naturang sensor ang isang non-contact motion switch ng uri ng VPB12, na binubuo ng isang sensor unit sa isang electronic unit. Kasama sa unit ng sensor ang isang inductive work sensor, isang inductive compensation sensor at mga naka-print na circuit board. Ang mekanismo ay naka-mount: kontrolin ang elemento ng ferrite. Supply boltahe 12 V DC. Ang maximum na distansya ng pagkakalantad ay hindi hihigit sa 0.12 mm. Maaaring ikonekta ang isang RPU-0 type relay sa output ng sensor. Ang maximum load current ng output device ay 0.16 A.
Mga sensor ng posisyon ng generator
Ang mga sensor ng ganitong uri ay compact at napakatumpak. Ang mga generator ng sensor ng seryeng KVD-6M at KVD-25 (na may mga puwang), KVP-8 at KVP-16 (sasakyang panghimpapawid) ay napatunayang mabuti ang kanilang sarili. Ang mga ito ay angkop para sa paggamit sa mataas na konsentrasyon ng kahalumigmigan at alikabok. Ang mga elemento ng transistor circuit ng sensor (generator at trigger) ay matatagpuan sa isang pabahay na gawa sa shock-resistant polystyrene. Ang pagbubuklod ay ginagawa gamit ang isang cold-hardening compound. Ang saklaw ng operating temperatura ay mula sa - 30 hanggang +50 ° C.
Ang HPC sensor ay bumubuo ng isang discrete signal kapag ang isang metal plate («flag») ay dumaan sa slot, na nagiging sanhi ng pagkasira sa henerasyon at paglipat ng trigger. Ang lapad ng slot ay 6 mm para sa KVD-6M sensor at 25 mm para sa KVD-25 sensor.
Ang mga sensor ng KVP-8 at KVP-16 ay isinaaktibo kapag ang isang metal plate ay dumaan sa kanila sa maximum na distansya na 8 at 16 mm, ayon sa pagkakabanggit.