Thyristor electric drive
 Sa industriya, ang mga actuator na may kinokontrol na mga balbula ng semiconductor - thyristors - ay malawakang ginagamit. Ang mga thyristor ay ginawa para sa mga alon hanggang sa daan-daang amperes, para sa mga boltahe na hanggang 1000 volts o higit pa. Ang mga ito ay nakikilala sa pamamagitan ng mataas na kahusayan, medyo maliit na sukat, mataas na bilis at ang kakayahang magtrabaho sa isang malawak na hanay ng mga ambient na temperatura (mula -60 hanggang +60 ° C).
Sa industriya, ang mga actuator na may kinokontrol na mga balbula ng semiconductor - thyristors - ay malawakang ginagamit. Ang mga thyristor ay ginawa para sa mga alon hanggang sa daan-daang amperes, para sa mga boltahe na hanggang 1000 volts o higit pa. Ang mga ito ay nakikilala sa pamamagitan ng mataas na kahusayan, medyo maliit na sukat, mataas na bilis at ang kakayahang magtrabaho sa isang malawak na hanay ng mga ambient na temperatura (mula -60 hanggang +60 ° C).
Ang thyristor ay hindi isang ganap na nakokontrol na aparato, na naka-on sa pamamagitan ng paglalapat ng kaukulang potensyal sa control electrode, at naka-off lamang sa pamamagitan ng sapilitang pagkagambala ng kasalukuyang circuit dahil sa interruption boltahe, ang natural na paglipat nito sa zero o supply ng isang pamamasa. boltahe ng kabaligtaran na tanda. Sa pamamagitan ng pagbabago ng tiyempo ng supply ng control boltahe (pagkaantala nito), maaari mong ayusin ang average na halaga ng rectified boltahe at sa gayon ang bilis ng motor.
Ang average na halaga ng rectified boltahe sa kawalan ng regulasyon ay pangunahing tinutukoy ng switching circuit ng thyristor converter. Ang mga transducer circuit ay nahahati sa dalawang klase: zero-pull at bridged.
Sa mga pag-install ng daluyan at mataas na kapangyarihan, ang mga circuit converter ng tulay ay pangunahing ginagamit, na pangunahin para sa dalawang kadahilanan:
-
mas kaunting boltahe sa bawat isa sa mga thyristor,
-
kawalan ng isang pare-pareho ang kasalukuyang bahagi na dumadaloy sa pamamagitan ng mga windings ng transpormer.
Ang mga converter circuit ay maaari ding mag-iba sa bilang ng mga phase: mula sa isa sa mga low-power installation hanggang 12 — 24 sa malalakas na converter.
Ang lahat ng mga variant ng mga thyristor converter kasama ang mga positibong katangian, tulad ng mababang inertia, kakulangan ng mga umiikot na elemento, mas maliit (kumpara sa mga electromechanical converter) sa laki, ay may ilang mga kawalan:
1. Mahirap na koneksyon sa network: lahat ng pagbabagu-bago ng boltahe sa network ay direktang ipinadala sa sistema ng pagmamaneho at ang pagtaas ng pagkarga, ang mga motor axes ay agad na inililipat sa network at nagiging sanhi ng mga kasalukuyang shocks.
2. Mababang power factor kapag inaayos ang boltahe pababa.
3. Pagbuo ng mas mataas na harmonics, load sa power grid.
Ang mga mekanikal na katangian ng isang motor na hinimok ng isang thyristor converter ay tinutukoy ng boltahe na inilapat sa armature at ang likas na katangian ng pagbabago nito kasama ang pagkarga, iyon ay, ang mga panlabas na katangian ng converter at ang mga parameter ng converter at ang motor.
Ang aparato at prinsipyo ng pagpapatakbo ng thyristor
Ang thyristor (Fig. 1, a) ay isang apat na layer na silicon semiconductor na may dalawang pn-junction at isang n-p-junction. Ang magnitude ng kasalukuyang Azpassing sa pamamagitan ng thyristor sa ilalim ng pagkilos ng anode boltahe Ua ay depende sa kasalukuyang Azduring ang control na dumadaan sa control electrode sa ilalim ng pagkilos ng control boltahe Uy.
Kung walang kasalukuyang kontrol (Azy = 0), pagkatapos ay habang tumataas ang boltahe U, ang kasalukuyang A sa circuit ng gumagamit P ay tataas, gayunpaman, nananatiling isang napakaliit na halaga (Fig. 1, b).

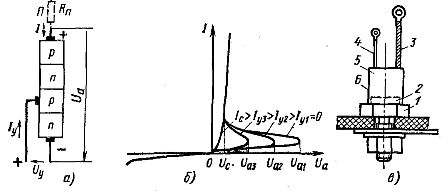
kanin. 1. Block diagram (a), kasalukuyang-boltahe na katangian (b) at pagbuo (c) ng thyristor
Sa oras na ito, ang n-p junction na naka-on sa non-conducting na direksyon ay may mataas na pagtutol. Sa isang tiyak na halaga Ua1 ng anode boltahe, na tinatawag na pagbubukas, pag-aapoy o paglipat ng boltahe, ang isang avalanche breakdown ng blocking layer ay nangyayari. Ang paglaban nito ay nagiging maliit at ang kasalukuyang lakas ay tumataas sa isang halaga na tinutukoy alinsunod sa batas ng Ohm sa pamamagitan ng resistensya Rp ng gumagamit P.
Habang tumataas ang kasalukuyang Iу, bumababa ang boltahe Ua. Ang kasalukuyang Iu, kung saan ang boltahe Ua ay umabot sa pinakamababang halaga, ay tinatawag na kasalukuyang I na may pagwawasto.
Ang thyristor ay nagsasara kapag ang boltahe Ua ay tinanggal o kapag ang sign nito ay nagbago. Ang rate na kasalukuyang I ng thyristor ay ang pinakamalaking average na halaga ng kasalukuyang dumadaloy sa pasulong na direksyon na hindi nagiging sanhi ng hindi katanggap-tanggap na overheating.
Ang nominal na boltahe Un ay tinatawag na pinakamataas na pinahihintulutang boltahe ng amplitude kung saan tinitiyak ang ibinigay na pagiging maaasahan ng aparato.
Ang pagbaba ng boltahe ΔHindi nalikha ng nominal na kasalukuyang ay tinatawag na nominal na pagbaba ng boltahe (karaniwan ay ΔUn = 1 — 2 V).
Ang halaga ng kasalukuyang lakas Ic ng pagwawasto ay nagbabago sa loob ng mga limitasyon ng 0.1 — 0.4 A sa isang boltahe na Uc 6 — 8 V.
Ang thyristor ay mapagkakatiwalaan na bubukas na may tagal ng pulso na 20 - 30 μs. Ang agwat sa pagitan ng mga pulso ay hindi dapat mas mababa sa 100 μs. Kapag ang boltahe Ua ay bumaba sa zero, ang thyristor ay naka-off.
Ang panlabas na disenyo ng thyristor ay ipinapakita sa fig.1, v… Nakabatay sa tanso 1 panlabing-anim na silicon na apat na layer na istraktura 2 na may sinulid na buntot, na may negatibong kapangyarihan 3 at kontrol ng 4 na mga output. Ang istraktura ng silikon ay protektado ng isang cylindrical na metal na pabahay 5. Ang insulator ay naayos sa housing 6. Ang isang thread sa base 1 ay ginagamit upang mag-install ng isang thyristor at upang ikonekta ang anode boltahe source sa positibong poste.
Habang tumataas ang boltahe Ua, bumababa ang control current na kinakailangan para buksan ang thyristor (tingnan ang Fig. 1, b). Ang control opening current ay proporsyonal sa control opening voltage uyo.
Kung ang Uа ay nagbabago ayon sa sinusoidal na batas (Larawan 2), kung gayon ang kinakailangang boltahe at 0 na pagbubukas ay maaaring ilarawan ng isang tuldok na linya. Kung ang inilapat na boltahe ng kontrol na Uy1 ay pare-pareho at ang halaga nito ay mas mababa sa pinakamababang halaga ng boltahe uuo, kung gayon ang thyristor ay hindi magbubukas.
Kung ang control boltahe ay tumaas sa halagang Uy2, ang thyristor ay magbubukas sa sandaling ang boltahe na Uy2 ay mas malaki kaysa sa boltahe uyo. Sa pamamagitan ng pagpapalit ng uу value, maaari mong baguhin ang opening angle ng thyristor sa hanay mula 0 hanggang 90°.
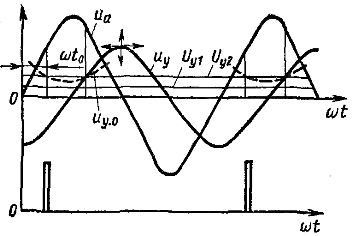
kanin. 2. Kontrol ng thyristor
Upang buksan ang thyristor sa mga anggulo sa itaas 90 °, ginagamit ang isang variable control boltahe uy, na nagbabago, halimbawa, sinusoidally. Sa isang boltahe na tumutugma sa intersection ng sine wave ng boltahe na ito na may tuldok na kurba uuo = f (ωt), bubukas ang Tiristor.
Sa pamamagitan ng paglipat ng sinusoid uyo pahalang sa kanan o kaliwa, maaari mong baguhin ang anggulo ωt0 pagbubukas ng thyristor. Ang pambungad na anggulo na kontrol na ito ay tinatawag na pahalang. Isinasagawa ito gamit ang mga espesyal na switch ng phase.
Sa pamamagitan ng paglipat ng parehong sine wave patayo pataas o pababa, maaari mo ring baguhin ang pambungad na anggulo. Ang ganitong pamamahala ay tinatawag na patayo. Sa kasong ito, na may variable na kontrol ng boltahe tyy, magdagdag ng pare-parehong boltahe sa algebraically, halimbawa, ang boltahe Uy1... Ang pambungad na anggulo ay nababagay sa pamamagitan ng pagbabago ng magnitude ng boltahe na ito.
Sa sandaling mabuksan, ang thyristor ay mananatiling bukas hanggang sa katapusan ng positibong kalahating ikot at ang kontrol ng boltahe ay hindi makakaapekto sa operasyon nito. Ginagawa rin nitong posible na ilapat ang kontrol ng pulso sa pamamagitan ng pana-panahong paglalapat ng mga pulso ng boltahe ng positibong kontrol sa tamang oras (Larawan 2 sa ibaba). Pinatataas nito ang kalinawan ng kontrol.
Sa pamamagitan ng pagpapalit ng pambungad na anggulo ng thyristor sa isang paraan o iba pa, ang mga boltahe na pulso ng iba't ibang mga hugis ay maaaring mailapat sa gumagamit. Binabago nito ang halaga ng average na boltahe sa mga terminal ng user.
Iba't ibang mga aparato ang ginagamit upang kontrolin ang mga thyristor. Sa scheme na ipinapakita sa fig. 3, ang boltahe ng AC mains ay inilalapat sa pangunahing paikot-ikot ng transpormador na Tp1.
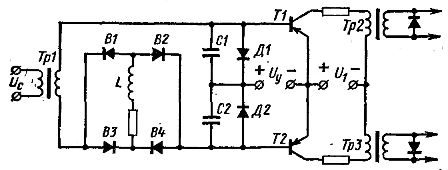
kanin. 3. Thyristor control circuit
Ang isang buong wave rectifier B ay kasama sa pangalawang circuit ng transpormer na ito.1, B2, B3, B4 na may makabuluhang inductance L sa DC circuit. Ang praktikal na alon ng alon ay halos inalis. Ngunit ang naturang direktang kasalukuyang ay maaari lamang makuha sa pamamagitan ng full-wave rectification ng isang alternating current na mayroong form na ipinapakita sa Fig. 4, a.
Kaya, sa kasong ito, ang rectifier B1, B2, B3, B4 (tingnan ang Fig. 3) ay isang converter sa anyo ng alternating current. Sa pamamaraang ito, ang mga capacitor C1 at C2 ay kahalili sa serye na may mga hugis-parihaba na kasalukuyang pulso (Larawan 4, a).Sa kasong ito, sa mga plato ng mga capacitor C1 at C2 (Larawan 4, b), nabuo ang isang transverse sawtooth boltahe, na inilapat sa mga base ng transistors T1 at T2 (tingnan ang Fig. 3).
Ang boltahe na ito ay tinatawag na reference na boltahe. Ang DC boltahe na Uy ay kumikilos din sa pangunahing circuit ng bawat transistor. Kapag ang saw boltahe ay zero, ang boltahe Uy ay lumilikha ng mga positibong potensyal sa mga base ng parehong transistor. Ang bawat transistor ay bubukas na may base na kasalukuyang sa isang negatibong potensyal na base.
Nangyayari ito kapag ang mga negatibong halaga ng saw reference boltahe ay lumalabas na mas malaki kaysa sa Uy (Larawan 4, b). Ang kundisyong ito ay natutupad depende sa halaga ng Uy sa iba't ibang mga halaga ng anggulo ng phase. Sa kasong ito, ang transistor ay bubukas para sa iba't ibang mga tagal ng panahon, depende sa magnitude ng boltahe Uy.
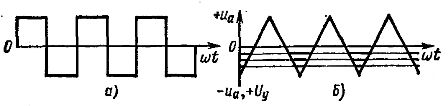
kanin. 4. Mga diagram ng mga boltahe ng kontrol ng thyristor
Kapag ang isa o ang iba pang transistor ay bumukas, ang isang hugis-parihaba na kasalukuyang pulso ay dumadaan sa pangunahing paikot-ikot ng transpormer na Tr2 o Tr3 (tingnan ang Fig. 3). Kapag ang nangungunang gilid ng pulso na ito ay pumasa, ang isang boltahe na pulso ay nangyayari sa pangalawang paikot-ikot, na inilalapat sa control electrode ng thyristor.
Kapag ang likod ng kasalukuyang pulso ay dumaan sa pangalawang paikot-ikot, nangyayari ang isang boltahe na pulso ng kabaligtaran na polarity. Ang pulso na ito ay sarado ng isang semiconductor diode na lumalampas sa pangalawang paikot-ikot at hindi inilalapat sa thyristor.
Kapag ang thyristors ay kinokontrol (tingnan ang Fig. 3) na may dalawang mga transformer, dalawang pulso ay nabuo, phase shifted sa pamamagitan ng 180 °.
Mga sistema ng kontrol ng motor ng thyristor
Sa mga sistema ng kontrol ng thyristor para sa mga DC motor, ang isang pagbabago sa DC armature boltahe ng motor ay ginagamit upang kontrolin ang bilis nito. Sa mga kasong ito, kadalasang ginagamit ang mga multiphase rectification scheme.
Sa fig. 5, at ang pinakasimpleng diagram ng ganitong uri ay ipinapakita gamit ang isang solidong linya. Sa circuit na ito, ang bawat isa sa mga thyristor T1, T2, T3 ay konektado sa serye na may pangalawang paikot-ikot ng transpormer at ang motor armature; NS. atbp. c. ang pangalawang paikot-ikot ay wala sa yugto. Samakatuwid, ang mga pulso ng boltahe na phase-shifted na nauugnay sa bawat isa ay inilalapat sa armature ng motor kapag kinokontrol ang pagbubukas ng anggulo ng thyristors.
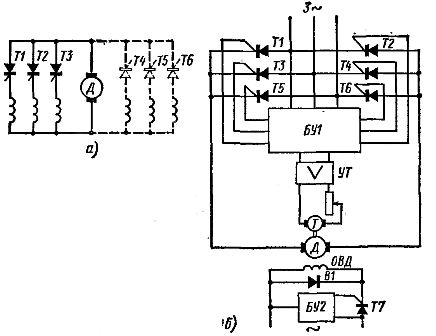
kanin. 5. Thyristor drive circuits
Sa isang polyphase circuit, ang mga pasulput-sulpot at tuluy-tuloy na mga alon ay maaaring dumaan sa armature ng motor, depende sa napiling anggulo ng pagpapaputok ng mga thyristor. Ang isang nababaligtad na electric drive (Larawan 5, a, ang buong circuit) ay gumagamit ng dalawang hanay ng mga thyristor: T1, T2, T3 at T4, T5, T6.
Sa pamamagitan ng pagbubukas ng mga thyristor ng isang tiyak na grupo, binabago nila ang direksyon ng kasalukuyang sa armature ng de-koryenteng motor at, nang naaayon, ang direksyon ng pag-ikot nito.
Ang pag-reverse ng motor ay maaari ding makamit sa pamamagitan ng pagbabago ng direksyon ng kasalukuyang sa field winding ng motor. Ang ganitong reverse ay ginagamit sa mga kaso kung saan ang mataas na bilis ay hindi kinakailangan dahil ang field winding ay may napakataas na inductance kumpara sa armature winding. Ang ganitong reverse stroke ay kadalasang ginagamit para sa mga thyristor drive ng pangunahing paggalaw ng mga metal cutting machine.
Ang pangalawang hanay ng mga thyristor ay ginagawang posible rin na magsagawa ng mga mode ng pagpepreno na nangangailangan ng pagbabago sa direksyon ng kasalukuyang sa armature ng de-koryenteng motor.Ang mga thyristor sa mga drive circuit na isinasaalang-alang ay ginagamit upang i-on at i-off ang motor, pati na rin upang limitahan ang pagsisimula at pagpepreno ng mga alon, na inaalis ang pangangailangan na gumamit ng mga contactor, pati na rin ang pagsisimula at pagpepreno ng mga rheostat.
Sa DC thyristor drive circuits, ang mga power transformer ay hindi kanais-nais. Pinapataas nila ang laki at gastos ng pag-install, kaya madalas nilang ginagamit ang circuit na ipinapakita sa Fig. 5 B.
Sa circuit na ito, ang pag-aapoy ng thyristor ay kinokontrol ng control unit BU1. Ito ay konektado sa isang three-phase na kasalukuyang network, sa gayon ay nagbibigay ng kapangyarihan at tumutugma sa mga phase ng control pulses na may anode boltahe ng thyristors.
Ang isang thyristor drive ay karaniwang gumagamit ng motor speed feedback. Sa kasong ito, ginagamit ang isang tachogenerator T at isang intermediate transistor amplifier UT. Ginagamit din ang feedback sa email. atbp. c. electric motor, na natanto sa pamamagitan ng sabay-sabay na pagkilos ng negatibong feedback sa boltahe at positibong feedback sa armature current.
Upang ayusin ang kasalukuyang paggulo, ginagamit ang isang thyristor T7 na may control unit BU2. Sa mga negatibong kalahating siklo ng boltahe ng anode, kapag ang thyristor T7 ay hindi pumasa sa kasalukuyang, ang kasalukuyang sa OVD ay patuloy na dumadaloy dahil sa e. atbp. c. self-induction, pagsasara sa bypass valve B1.
Thyristor electric drive na may kontrol sa lapad ng pulso
Sa itinuturing na thyristor drive, ang motor ay pinapagana ng mga boltahe na pulso na may dalas na 50 Hz. Upang mapataas ang bilis ng pagtugon, inirerekomenda na dagdagan ang dalas ng pulso.Ito ay nakakamit sa mga thyristor drive na may kontrol sa lapad ng pulso, kung saan ang mga rectangular DC pulse na may iba't ibang tagal (latitude) na may dalas na hanggang 2-5 kHz ay dumadaan sa armature ng motor. Bilang karagdagan sa mabilis na pagtugon, ang naturang kontrol ay nagbibigay ng malalaking saklaw ng kontrol ng bilis ng motor at mas mataas na pagganap ng enerhiya.
Sa pamamagitan ng kontrol sa lapad ng pulso, ang motor ay pinapagana ng isang hindi nakokontrol na rectifier, at ang thyristor na konektado sa serye gamit ang armature ay pana-panahong sarado at binubuksan. Sa kasong ito, ang mga DC pulse ay dumadaan sa armature circuit ng motor. Ang pagbabago sa tagal (latitude) ng mga pulso na ito ay nagreresulta sa pagbabago sa bilis ng pag-ikot ng de-koryenteng motor.
Dahil sa kasong ito ang thyristor ay nagpapatakbo sa pare-pareho ang boltahe, ang mga espesyal na circuit ay ginagamit upang isara ito. Ang isa sa pinakasimpleng pulse width control scheme ay ipinapakita sa Fig. 6.
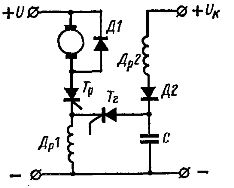
kanin. 6. Thyristor electric drive na may kontrol sa lapad ng pulso
Sa circuit na ito, naka-off ang thyristor Tr kapag naka-on ang damping thyristor Tr. Kapag bumukas ang thyristor na ito, ang naka-charge na capacitor C ay naglalabas sa throttle Dr1, lumilikha ng isang makabuluhang e. atbp. c. Sa kasong ito, lumilitaw ang isang boltahe sa mga dulo ng choke, na mas malaki kaysa sa boltahe U ng rectifier at nakadirekta dito.
Sa pamamagitan ng isang rectifier at shunt diode D1, ang boltahe na ito ay inilalapat sa thyristor Tr at nagiging sanhi ng pag-off nito. Kapag naka-off ang thyristor, sisingilin muli ang capacitor C sa switching voltage Uc > U.
Dahil sa tumaas na dalas ng kasalukuyang mga pulso at ang pagkawalang-galaw ng armature ng motor, ang likas na katangian ng pulso ng power supply ay halos hindi makikita sa kinis ng pag-ikot ng motor. Ang thyristors Tr at Tr ay binuksan ng isang espesyal na phase shift circuit na nagpapahintulot sa lapad ng pulso na baguhin.
Ang industriya ng elektrikal ay gumagawa ng iba't ibang mga pagbabago ng ganap na regulated thyristor DC power drive. Kabilang sa mga ito ang mga drive na may 1:20 speed control range; 1:200; 1: 2000 sa pamamagitan ng pagpapalit ng boltahe, irreversible at reversible drive, na may at walang electric braking. Ang kontrol ay isinasagawa sa pamamagitan ng transistor phase-pulse device. Gumagamit ang mga drive ng negatibong feedback sa motor rpm at e. counter atbp. kasama
Ang mga bentahe ng mga thyristor drive ay mataas na mga katangian ng enerhiya, maliit na sukat at timbang, ang kawalan ng anumang umiikot na makinarya maliban sa isang de-koryenteng motor, mataas na bilis at patuloy na kahandaan para sa trabaho. Ang pangunahing kawalan ng mga thyristor drive ay ang kanilang mataas na gastos, na makabuluhang lumampas ang halaga ng mga drive na may electric machine at magnetic amplifier.
Sa kasalukuyan, mayroong isang tuluy-tuloy na kalakaran patungo sa malawakang pagpapalit ng mga thyristor DC drive na may variable frequency AC drive.