Sistema ng generator - DC motor
 Ang iba't ibang mga tool sa makina ay madalas na nangangailangan ng walang hakbang na kontrol sa bilis ng pagmamaneho sa isang mas malawak na hanay kaysa sa maaaring ibigay sa pamamagitan ng pagsasaayos ng magnetic flux. DC motor na may parallel excitation… Sa mga kasong ito, mas kumplikadong mga electric drive system ang ginagamit.
Ang iba't ibang mga tool sa makina ay madalas na nangangailangan ng walang hakbang na kontrol sa bilis ng pagmamaneho sa isang mas malawak na hanay kaysa sa maaaring ibigay sa pamamagitan ng pagsasaayos ng magnetic flux. DC motor na may parallel excitation… Sa mga kasong ito, mas kumplikadong mga electric drive system ang ginagamit.
Sa fig. Ang 1 ay nagpapakita ng isang diagram ng isang adjustable electric drive ayon sa isang generator-motor system (dinaglat G - D). Sa sistemang ito, ang isang induction motor na IM ay patuloy na umiikot sa isang independently excited na DC generator G at isang exciter B, na isang parallel-excited na low-power DC generator.
Ang DC motor D ang nagtutulak sa gumaganang katawan ng makina. Ang excitation windings ng generator OVG at ang motor ATS ay ibinibigay ng exciter B. Sa pamamagitan ng pagbabago ng resistensya ng excitation circuit ng generator G sa pamamagitan ng rheostat 1, ang boltahe na inilapat sa armature ng motor D ay binago, at sa gayon ay ang Ang bilis ng motor ay kinokontrol. Sa kasong ito, ang motor ay gumagana nang buo at pare-pareho ang flux dahil ang rheostat 2 ay inalis.
Kapag nagbago ang boltahe U, nagbabago ang bilis n0 perpektong bilis ng motor idle D. Dahil hindi nagbabago ang flux ng motor at ang resistensya ng armature circuit nito, nananatiling pare-pareho ang slope b. Samakatuwid, ang mga rectilinear na mekanikal na katangian na naaayon sa iba't ibang mga halaga ng U ay matatagpuan sa ibaba ng isa at parallel sa bawat isa (Larawan 2).
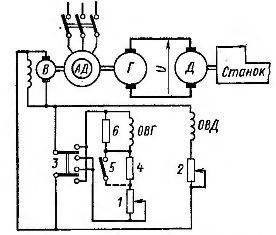
kanin. 1. System generator - DC motor (dpt)
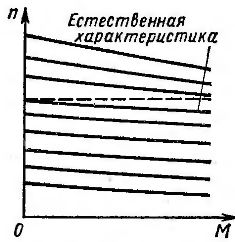
kanin. 2. Mga mekanikal na katangian ng generator - DC motor system
Mayroon silang mas malaking slope kaysa sa mga katangian ng parehong de-koryenteng motor na pinapakain mula sa pare-parehong network, dahil sa sistema ng G - D ang boltahe U sa isang pare-parehong kasalukuyang paggulo ng generator ay bumababa sa pagtaas ng pagkarga ayon sa pag-asa:
saan hal. at rg — e, ayon sa pagkakabanggit. atbp. pp. at ang panloob na pagtutol ng generator.
Sa pamamagitan ng pagkakatulad sa mga asynchronous na motor, tinutukoy namin
Ang halagang ito ay nagpapakilala sa pagbaba sa bilis ng engine kapag ang pagkarga ay tumaas mula sa zero hanggang sa nominal. Para sa mga parallel na mekanikal na katangian
Tumataas ang halagang ito habang bumababa ang n0. Sa malalaking halaga ng sn, ang tinukoy na mga kondisyon ng pagputol ay magbabago nang malaki sa mga random na pagbabagu-bago ng pagkarga. Samakatuwid, ang saklaw ng regulasyon ng boltahe ay karaniwang mas mababa sa 5:1.
Habang bumababa ang rate ng kapangyarihan ng mga motor, ang pagbaba ng boltahe sa mga motor ay tumataas at ang mga mekanikal na katangian ay nagiging matarik. Para sa kadahilanang ito, ang saklaw ng regulasyon ng boltahe ng G -D system ay nababawasan habang bumababa ang kapangyarihan (para sa mga kapangyarihan na mas mababa sa 1 kW hanggang 3:1 o 2:1).
Habang bumababa ang magnetic flux ng generator, ang demagnetizing effect ng armature reaction nito ay nakakaapekto sa boltahe nito sa mas malaking lawak. Samakatuwid, ang mga katangian na nauugnay sa mababang bilis ng engine ay talagang may mas malaking slope kaysa sa mga mekanikal na katangian.
Ang pagpapalawak ng hanay ng kontrol ay nakakamit sa pamamagitan ng pagbabawas ng magnetic flux ng motor D sa pamamagitan ng rheostat 2 (tingnan ang Fig. 1), na ginawa sa buong daloy ng generator. Ang pamamaraang ito ng regulasyon ng bilis ay tumutugma sa mga katangian na matatagpuan sa itaas ng natural isa (tingnan ang Fig. 2).
Ang kabuuang hanay ng kontrol, katumbas ng produkto ng mga hanay ng kontrol ng parehong mga pamamaraan, ay umabot sa (10 — 15): 1. Ang regulasyon ng boltahe ay pare-pareho ang kontrol ng torque (dahil ang magnetic flux ng motor ay nananatiling hindi nagbabago). Ang regulasyon sa pamamagitan ng pagbabago ng magnetic flux ng motor D ay isang pare-parehong regulasyon ng kuryente.
Bago simulan ang motor, ang D rheostat 2 (tingnan ang Fig. 1) ay ganap na tinanggal at ang motor flux ay umabot sa pinakamataas na halaga. Pagkatapos ay pinapataas ng rheostat 1 ang paggulo ng generator G. Ito ay nagiging sanhi ng pagtaas ng boltahe at ang bilis ng motor D upang tumaas. Kung ang coil OVG ay konektado kaagad sa buong boltahe na UB ng exciter B, ang kasalukuyang nasa loob nito, tulad ng sa anumang circuit na may inductance at aktibong pagtutol, ay tataas:
kung saan ang rv ay ang paglaban ng excitation coil, ang LB ay ang inductance nito (pabayaan ang epekto ng saturation ng magnetic circuit).
Sa fig. 3, a (curve 1) ay nagpapakita ng graph ng dependence ng excitation current sa oras. Ang kasalukuyang paggulo ay unti-unting tumataas; ang rate ng pagtaas ay tinutukoy ng ratio

kung saan ang Tv ay ang electromagnetic time constant ng generator excitation winding; ito ay may sukat ng oras.
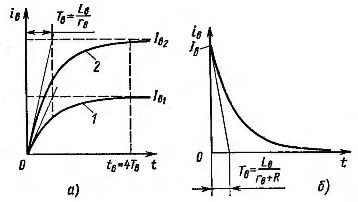
kanin. 3. Pagbabago sa kasalukuyang paggulo sa G-D system
Ang pagbabago sa boltahe ng generator sa pagsisimula ay may humigit-kumulang kaparehong katangian ng pagbabago sa kasalukuyang paggulo. Nagbibigay-daan ito sa motor na awtomatikong magsimula nang inalis ang rheostat 1 (tingnan ang Fig. 1).
Ang pagtaas sa kasalukuyang paggulo ng generator ay madalas na pinabilis (sapilitang) sa pamamagitan ng paglalapat sa paunang sandali sa paggulo ng paikot-ikot ng boltahe na lumalampas sa nominal. Pagkatapos ang proseso ng pagtaas ng paggulo ay magpapatuloy sa kahabaan ng curve 2 (tingnan ang Fig. 3, a ). Kapag ang kasalukuyang sa coil ay umabot sa Iv1, katumbas ng steady-state excitation current sa rated boltahe, ang boltahe ng excitation coil ay nabawasan sa nominal. Ang oras ng pagtaas ng kasalukuyang paggulo sa nominal ay nabawasan.
Upang pilitin ang paggulo ng generator, ang exciter boltahe V (tingnan ang Fig. 1) ay pinili ng 2-3 beses na mas mataas kaysa sa nominal na boltahe ng generator excitation coil at isang karagdagang risistor 4 ay ipinakilala sa circuit. …
Ang generator-motor system ay nagbibigay-daan sa regenerative braking. Upang huminto, kinakailangan para sa kasalukuyang nasa armature na baguhin ang direksyon nito. Magbabago din ng sign ang torque at sa halip na magmaneho, ito ay magiging braking. Nangyayari ang paghinto kapag tumaas ang magnetic flux ng motor rheostat 2 o kapag bumababa ang boltahe ng generator kasama ng rheostat 1. Sa parehong mga kaso, hal. atbp. c. Ang E ng motor ay nagiging mas mataas kaysa sa boltahe U ng generator.Sa kasong ito, ang motor D ay nagpapatakbo sa generator mode at hinihimok sa pag-ikot ng kinetic energy ng mga gumagalaw na masa, at ang generator G ay nagpapatakbo sa motor mode, na umiikot sa IM machine sa supersynchronous na bilis, na sa parehong oras ay lumipat sa generator mode at nagbibigay ng kapangyarihan sa network.
Maaaring gawin ang regenerative braking nang hindi naaapektuhan ang rheostats 1 at 2. Maaari mo lamang buksan ang generator excitation circuit (hal. switch 3). Sa kasong ito, ang kasalukuyang sa isang closed circuit na binubuo ng excitation winding ng generator at risistor 6 ay unti-unting bababa
kung saan ang R ay ang paglaban ng risistor 6.
Ang graph na naaayon sa equation na ito ay ipinapakita sa Fig. 3, b. Ang isang unti-unting pagbaba sa kasalukuyang paggulo ng generator sa kasong ito ay katumbas ng isang pagtaas sa paglaban ng rheostat 1 (tingnan ang Fig. 1) at nagiging sanhi ng regenerative braking. Sa circuit na ito, ang risistor 6 na konektado kahanay sa paikot-ikot na paggulo ng generator ay isang discharge risistor. Pinoprotektahan nito ang pagkakabukod ng paikot-ikot na paggulo mula sa pinsala sa kaganapan ng isang biglaang pagkagambala sa emergency ng circuit ng paggulo.
Kapag ang circuit ng paggulo ay nagambala, ang magnetic flux ng makina ay bumababa nang husto, nag-uudyok sa e sa mga pagliko ng excitation coil. atbp. c. ang self-inductance ay napakahusay na ito ay maaaring maging sanhi ng winding insulation na masira. Ang discharge resistor 6 ay lumilikha ng isang circuit kung saan e. atbp. c. ang self-induction ng field coil ay nag-uudyok ng kasalukuyang na nagpapabagal sa pagbaba ng magnetic flux.
Ang pagbagsak ng boltahe sa discharge resistor ay katumbas ng boltahe sa field coil.Ang mas mababa ang halaga ng discharge resistance, mas mababa ang boltahe ng excitation coil kapag nasira ang circuit. Kasabay nito, na may pagbawas sa halaga ng paglaban ng discharge risistor, ang kasalukuyang patuloy na dumadaloy dito sa normal na mode at ang mga pagkalugi dito ay tumataas. Ang parehong mga probisyon ay dapat isaalang-alang kapag pumipili ng halaga ng paglaban sa paglabas.
Matapos patayin ang paikot-ikot na paggulo ng generator, ang isang maliit na boltahe ay nananatili sa mga terminal nito dahil sa natitirang magnetism. Maaari itong maging sanhi ng pag-ikot ng motor nang mabagal sa tinatawag na bilis ng paggapang. Upang maalis ang hindi pangkaraniwang bagay na ito, ang paikot-ikot na paggulo ng generator, pagkatapos na idiskonekta mula sa exciter, ay konektado sa mga terminal ng generator upang ang boltahe mula sa natitirang magnetism ay nagiging sanhi ng isang demagnetizing kasalukuyang sa paggulo ng paikot-ikot ng generator.
Upang baligtarin ang electric motor D, ang direksyon ng kasalukuyang sa excitation coil ng generator OVG G ay binago gamit ang switch 3 (o isa pang katulad na device). Dahil sa makabuluhang inductance ng coil, ang kasalukuyang paggulo ay unti-unting bumababa, nagbabago ng direksyon at pagkatapos ay unti-unting tumataas.
Ang mga proseso ng pagsisimula, pagpapahinto at pag-reverse ng motor sa isinasaalang-alang na sistema ay lubos na matipid, dahil ang mga ito ay isinasagawa nang hindi gumagamit ng mga rheostat na kasama sa armature. Ang motor ay sinisimulan at binilisan gamit ang magaan at compact na kagamitan na kumokontrol lamang sa maliliit na agos ng field. Samakatuwid, ang sistemang "generator - DC motor" na ito ay inirerekomenda na gamitin para sa trabaho na may madalas na pagsisimula, preno at pagbaliktad.
Ang pangunahing disadvantages ng motor-generator-DC system ay medyo mababa ang kahusayan, mataas na gastos at masalimuot dahil sa pagkakaroon ng isang malaking bilang ng mga electric machine sa system. Ang presyo ng system ay lumampas sa presyo ng isang asynchronous squirrel-cage motor na may parehong kapangyarihan 8 — 10 beses. Bukod dito, tulad sistema ng electric drive nangangailangan ng maraming espasyo.