Mga electric drive control circuit
 Depende sa bilis ng mga elevator ng pasahero, ang mga sumusunod na uri ng power control circuit ay pinagtibay:
Depende sa bilis ng mga elevator ng pasahero, ang mga sumusunod na uri ng power control circuit ay pinagtibay:
-
Ang mga low-speed elevator ay may squirrel cage o phase rotor motors at isang button o lever control,
-
high-speed elevator-dalawa o one-speed na motor na kinokontrol ng mga magnetic station o thyristor control station (TSU-R) na may mga control button,
-
high-speed at high-speed elevator - Mga DC motor na kinokontrol ng "generator - motor" system na may iba't ibang mga scheme ng paggulo o ng "thyristor converter - motor" system na may mga pindutan,
-
Ang mga chain ng asynchronous valve cascades (AVK) ay maaari ding gamitin, ang paggamit nito ay ginagawang posible upang madagdagan ang kahusayan. pag-install.
Ang mga elevator ng pasahero, depende sa daloy ng pasahero, taas ng pag-aangat at bilang ng mga elevator na nagsisilbi sa mga pasahero, ay nahahati sa kontrol ng isa at grupo.
Kasama sa mga single ang:
a) mga elevator na tumatakbo sa iisang order at tawag nang hindi tumatawid na humihinto sa panahon ng pagbaba at pag-akyat ng mga pasahero,
b) mga elevator na may sakay ng mga pasahero kapag bababa, ngunit may pagbabawal sa mga tawag kapag aakyat,
c) pareho, ngunit may pagpaparehistro ng mga tawag kapag bumababa kasama ang kanilang kasunod na pagpapatupad.
Kasama sa mga elevator na pinapatakbo ng grupo ang:
a) mga elevator na may isang pindutan para sa pagtawag sa mga landing place, anuman ang bilang ng mga naka-install na elevator (mas madalas na ginagamit ang dobleng kontrol) at may sakay ng pasahero kapag bumababa,
b) pareho, ngunit may kumpletong koleksyon ng mga pasahero sa mga intermediate na palapag para sa pagsakay at pagbaba (karaniwang naka-install sa administratibo, pang-edukasyon at iba pang mga gusali).
Bilang karagdagan, napakakaraniwan na magpadala ng mga elevator sa isang bilang ng mga bahay at buong kapitbahayan, kapag ang estado ng mga circuit ay sinusubaybayan mula sa isang dispatch console at maraming mga elevator ang kinokontrol.
Anuman ang bilis ng mga elevator, solong o pangkat na kontrol sa kanila, ang mga kinakailangang elemento ng karamihan sa kanilang mga scheme ay ang mga sumusunod:
-
self-adjusting buttons, sticky o closing button para sa pagtawag sa mga cab at pagbibigay ng order mula sa cab,
-
iba't ibang mga sensor ng pagpili at tumpak na stop matching device upang irehistro ang lokasyon ng cabin at ang estado ng mga de-koryenteng circuit,
-
mga sensor at interlock para sa estado ng mga hoisting rope, ang estado ng minahan at mga pintuan ng cabin (bukas o sarado),
-
limitahan ang mga switch upang limitahan ang bilis at antas ng pagkarga ng cabin,
-
mga tagapagpahiwatig para sa direksyon ng paggalaw ng kotse at, sa ilang mga elevator, ang pagkakaroon ng isang load sa kotse.
Sa mga item na ito, tatalakayin natin nang mas detalyado ang mga position matching device (PSC), na tumutukoy sa lugar kung saan dapat huminto ang sasakyan ng minahan kapag may tumawag o nag-order, at ang paggalaw nito pataas o pababa.Ang natitirang mga item ay karaniwang iba't ibang mga pagbabago ng mga switch ng limitasyon na kilala mula sa iba pang mga kurso.
Sa istruktura, ang mga position matching device ay ipinapatupad sa anyo ng isang set ng tatlong posisyong electromechanical o inductive o magnetic (reed) sensor na matatagpuan sa mga minahan, na may mga signal na output sa isang relay o non-contact selector sa engine room (minsan ipinapatupad ang mga CCP. sa anyo ng mga yunit ng gitnang palapag na matatagpuan sa silid ng makina) ...
Ang mga sensor na matatagpuan sa minahan ay nakikipag-ugnayan sa mga sanga na naka-mount sa taksi (para sa electromechanical) o magnetic shunt (para sa inductive o reed switch) at nagpapadala ng mga signal sa central floor unit (step copier o relay relay) na naka-install sa silid ng makina, at ang ang huli ay nagpapadala at isang control circuit - isang senyas upang isagawa ang natanggap na utos.
Mas kapaki-pakinabang na ilagay ang mga sensor para sa mga signal ng paggalaw ng kotse pataas o pababa sa kotse (mas kaunting mga wire ang kailangan) at mag-install ng mga magnetic shunt sa mga minahan sa mga kinakailangang punto. Sa kasong ito, na may digital control, ang bilang ng mga column na may naka-install na shunt sa kahabaan ng shaft ay katumbas ng bilang ng mga bits ng transmitted floor number sa binary o iba pang code.
Ang tatlong-posisyon na mga electromechanical switch ay inililipat sa isa sa mga posisyong naaayon sa paggalaw ng taksi pataas o pababa, o ang paghinto nito, sa pamamagitan ng isang curling arrangement.Sa kasong ito, kapag gumagalaw ang kotse, ang mga contact ng mga switch sa mga palapag na naipasa ay naka-on sa isa sa mga posisyon ng pagtatapos, naghahanda para sa pagkilos ng chain ng mga tawag at order, at kapag huminto ang kotse, ang switch ay inilipat sa gitnang posisyon, pinapatay ang control circuit mula sa mga directional contactor at sa gayon ay hindi kasama ang kotse mula sa pag-alis sa sahig kapag ang pindutan ng order o tawag ay maling pinindot.
Upang matiyak ang medyo tumpak na pagpepreno ng elevator car, kamakailan lamang ay nagsimulang gamitin ang non-contact inductive o contact-sealed magnetically controlled (reed) sensor sa kanilang mga control circuit. Ang mga sensor na ito ay naka-install pareho sa minahan at sa cabin: sa minahan mayroong mga sensor para sa pagpili (deceleration), at sa cabin mayroong isang sensor para sa tumpak na paghinto. Upang mag-interface sa mga sensor, ang isang lantern magnetic selective shunt ay inilalagay sa sabungan, at ang ferromagnetic precision-stop shunt ay inilalagay sa shaft (sa bawat palapag).
Ang mga inductive sensor ay binubuo ng isang bukas na U-shaped magnetic circuit na may coil na nakapaloob sa isang housing. Ang paikot-ikot ng executive relay ay konektado sa serye kasama nito at ang isang alternating kasalukuyang boltahe (U) ay inilalapat sa kanila.
Sa isang bukas na magnetic circuit, ang magnetic flux na tumatawid sa coil ay maliit. Kaya naman ang e.m.f. at ang kasalukuyang self-induction sa mga wire ng coil, pati na rin ang inductive resistance (X) na dulot nito, ay halos wala, kaya ang resistensya ng coil ay aktibo (R). Ang kasalukuyang sa series-connected coils ay medyo malaki; ginagaya ang pagsasara ng mga contact sa contact system (ang relay ay naka-on).
Kapag isinara ng shunt ang hugis-U na magnetic circuit, tumataas ang magnetic flux na tumatawid sa coil nito at samakatuwid ay tumataas ang emf. self-inductance pati na rin ang inductive resistance ng coil dahil dito. Bilang isang resulta, ang kasalukuyang sa mga coils na konektado sa serye ay bumababa, na ginagaya ang pagbubukas ng circuit sa contact system (ang executive relay ay naka-off).
Ang reed switch ay isang hugis-U na katawan kung saan sa isang gilid ng groove ay inilalagay ang dalawang selyadong glass flasks na may vacuum sa loob at mga contact na naayos sa spring plates na konektado sa kani-kanilang elevator control circuits. Sa kabilang panig ng slot ay isang permanenteng magnet. Ang gumaganang elemento ng naturang mga sensor ay isang ferromagnetic shunt na dumadaan sa hugis-U na hiwa kapag gumagalaw ang elevator car.
Ang prinsipyo ng pagpapatakbo ng mga sensor na ito ay ang mga sumusunod: ang mga puwersa ng tagsibol ng mga contact plate ng mga switch ng tambo ay nakadirekta upang kung ang patlang ng isang permanenteng magnet ay hindi kumilos sa kanila, kung gayon ang mga karaniwang bukas na mga contact ay bukas, at ang normal na ang mga saradong contact ay sarado, i.e. ang mga circuit kung saan nakakonekta ang mga contact na ito ay bubuksan o isasara.
Ang kondisyon ng reed switch na ito ay kapag ang ferromagnetic shunt ay nasa uka ng isang hugis-U na katawan, dahil ang mga linya ng magnetic field ng permanenteng magnet ay sarado sa kabuuan ng shunt. Kapag ang shunt ay lumabas sa groove, ang mga linya ng magnetic field ay sarado sa kabuuan ang mga plato, na nagtagumpay sa kanilang pagkilos sa tagsibol, at ang mga contact ng reed switch, at samakatuwid ang mga circuits kung saan sila ay konektado, pumunta sa kabaligtaran ng estado.

Bilang isang halimbawa na sumasalamin sa mga pangunahing tampok ng mga scheme ng kontrol ng elevator, isaalang-alang ang control scheme para sa isang solong elevator na walang nauugnay na mga hinto na ipinapakita sa Fig. 1. Ang elevator ay nagsisilbi sa apat na palapag; ang isang dalawang-bilis na asynchronous na motor M ay ginagamit bilang isang executive motor.
Ang pagsasama ng mababang (Ml) o mataas (B) na mga rebolusyon ng motor ay isinasagawa ng kaukulang mga contactor Ml at B. Ang direksyon ng pag-ikot ng motor ay tinutukoy ng mga contactor B at H, pagbabawas ng bilis - sa pamamagitan ng isang karagdagang risistor P, paghinto - sa pamamagitan ng electromagnetic brake ET.
Ginagamit bilang mga switch sa sahig non-contact inductive sensors (DTS, DTOV at DTON) konektado sa serye sa mga relay coils (RIS, RITOV, RITON). Ang mga TTP sensor ay ginagamit upang i-on ang elevator drive sa mataas na bilis at magbigay ng isang salpok na bumagal, habang ang DTOV at DTON sensor ay idinisenyo upang tiyak na ihinto ang elevator sa antas ng sahig ng kaukulang palapag at inilagay sa kotse, Ang mga magnetic shunt para sa kanila ay naka-install sa baras ng baras.
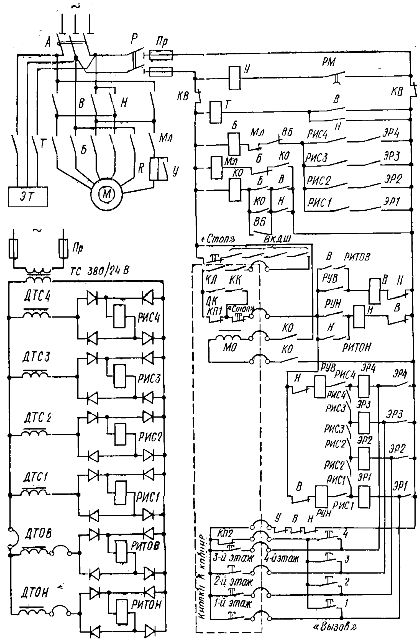
kanin. 1. Schematic diagram ng iisang elevator control
Isaalang-alang natin ang layunin ng natitirang mga elemento ng circuit at ang operasyon nito gamit ang halimbawa ng paglipat ng isang cabin na may pasahero mula sa ika-1 hanggang ika-3 palapag, sa pag-aakalang ang awtomatikong makina A, ang disconnector P at ang limitasyon ay lumipat sa KB na nililimitahan ang ang paggalaw ng cabin pataas at pababa sa mga emergency mode, ay sarado at ang cabin ay nasa ground floor. Sa kasong ito, ang mga coils ng RIS relay, bilang karagdagan sa relay ng unang palapag, ay dumadaloy mula sa rate na kasalukuyang.
Kapag pinindot ang button na «3rd floor», nabuo ang sumusunod na electrical circuit: network phase — poste ng disconnector P — fuse Pr — limit switch KB — button «Stop» — pagsasara ng mga pintuan ng minahan D1 — D4 — mga contact para sa tensioning ang rope KK — safety limit switch KL — cabin door switch DK — contacts ng «Stop» button — opening block -contact Н — relay coil RUV — closing contacts ng relays RIS4 at RISZ (ang mga coil ng mga relay na ito ay nagdadala ng kasalukuyang) — coil ng floor relay ERZ — button «3rd floor» — opening blocks — mga contact ng contactor U, B, N — limit switch KB — fuse R — disconnector pole P — network phase.
Pagkatapos kumilos ng relay RUV at ER3, ang forward travel contactor B, fast travel contactor B (sa coil circuit B — block contact ML — high-speed switch VB — relay contacts RISZ at ER3) ay naka-on. Kapag ang mga contact B at B ay sarado, ang motor ay konektado sa mga mains, ang contactor T, ang release pulley at ang shunt contactor KO, na nag-o-on sa shunt solenoid MO at inihahanda ang circuit ng low-speed contactor coil Ml, ay nakabukas. Ang stroke ay binawi, pinakawalan ang locking lever at ang taksi ay nagsimulang gumalaw.
Kapag lumalapit ang cabin sa ikatlong palapag, isinasara ng ferromagnetic shunt ang coil ng TTSZ sensor, tumataas ang resistensya nito, at nawawala ang RISZ relay, na pinapatay ang ER3 at RUV relay. Bilang resulta, nawawala ang contactor B, isinara ang contact nito, i-on ang low-speed contactor Ml, at nananatiling naka-on ang contactor B, dahil kapag gumagalaw ang sasakyan, hindi pa nakasara ang magnetic circuit ng precise brake sensor, samakatuwid, ang Hindi pa rin bukas ang contact ng RITOV.Ang motor ay huminto sa mababang bilis na tumatakbo sa generator mode na may isang risistor R. ipinakilala sa isang yugto ng stator.
Sa sandaling nakahanay ang sahig ng kotse sa sahig ng sahig, isinasara ng magnetic shunt ang magnetic circuit ng coil ng eksaktong stop sensor na DTOV, nawala ang relay na RITOV at ang mga contactor B, pagkatapos ay KO at sa wakas ay nakabukas ang ML Dahil dito, ang electromagnet ng motor at ang preno ay hindi nakakonekta sa mains, inilapat ang mekanikal na preno at ang taksi ay huminto.
Upang matutunan ang isang kolektibong pamamaraan para sa pagkontrol sa mga elevator na may mga passing stop lamang kapag ibinababa ang kotse o isang ganap na kolektibong pamamaraan, i.e. kapag ang pagpasa ay huminto habang ang kotse ay gumagalaw pataas at pababa, ito ay kinakailangan sa isang pamamaraan na katulad ng tinalakay sa fig. 1, ipakilala ang ilang mga karagdagan. Halimbawa, sa isang two-speed motor circuit, ang mga ID inductive sensor, ang RIS relay, at ang call and order buttons sa bawat palapag ay kasama tulad ng ipinapakita sa Fig. 2.
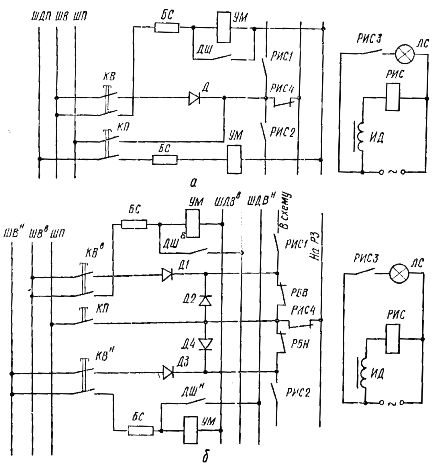
kanin. 2. Mga fragment ng mga karagdagan sa mga collective elevator control scheme (isang palapag)
Sa isang scheme na may passing stops kapag ibinababa ang cabin (Larawan 2, a), ang mga tawag at order ay ibinibigay sa pamamagitan ng magkahiwalay na malagkit na mga pindutan at samakatuwid ay maaaring mairehistro anumang oras at maipadala kaagad sa scheme, maliban sa panahon ng paggalaw ng cabin na may mga pasahero sa itaas kapag ang supply bus ng mga transfer contact ay tumatawag sa executive circuit ay pinatay ng mga piling contact mula sa positibong bus.
Sa kumpletong selective control scheme (Fig. 2, b) may mga karagdagang ringing circuit para sa boarding (ШДВв) at lowering (ШДВн) cabin, ang mga contact ng blocking relays RBV at RBN ay konektado sa mga contact ng selective sectional circuit executive circuit .
Sa mga diagram na ipinapakita sa Fig. 1 at 2, sa kawalan ng isang cabin sa sahig, ang mga coils ng ID inductive sensor at ang RIS relay ay pinalakas. Samakatuwid, kapag pinindot mo ang command command button o tumawag sa KV (ang mga ito ay gaganapin sa on state ng UM retaining magnets hanggang sa madaig sila ng mga contact ng mga pintuan ng minahan sa palapag na ito ng DSh), isang circuit ang nabuo (hindi ipinapakita sa mga figure) na kinabibilangan ng up control relay RUV kung ang patutunguhang palapag ay mas mataas kaysa sa sahig ng paradahan ng sasakyan, o ang down control relay na LVL kung ang patutunguhang palapag ay nasa ibaba ng paradahan ng sasakyan.
Matapos ang pagdating ng kotse sa call floor, ang ID ng inductive sensor ay inilabas, ang RIS relay ay naka-off, binubuksan ang mga contact nito, na pinapatay ang RUV o RUN relay at ang LS lamp (hihinto ang kotse), at sa pamamagitan ng pagsasara ng contact ng RIS4, isang circuit ang inihanda para sa pagpapatupad ng order na nagmumula sa kotse.
Sa kumpletong kolektibong circuit, ang circuit na hinati ng mga contact na RIS1 at RIS2 sa sahig ng paradahan ng kotse ay nasira hindi lamang ng mga contact na ito, kundi pati na rin ng mga contact ng blocking relay pataas RBV o pababa RBN (ang kanilang mga coils ay hindi ipinapakita sa diagram), at ang pagtaas, pagbaba, at pag-order ng mga circuit ay pinaghihiwalay sa isa't isa sa pamamagitan ng paghihiwalay ng mga diode D1 - D4.
Bago pindutin ang call or order button, kung ang direksyon ng paglalakbay ng sasakyan ay hindi pa napili, lahat ng contact sa circuit selection ng direksyon ay sarado, maliban sa mga contact ng RIS4 sa parking floor.Samakatuwid, kapag pinindot ang isa sa mga button na ito, ang mga signal ng tawag mula sa mga palapag na matatagpuan sa itaas ng sahig ng paradahan ng sasakyan ay konektado sa relay coil RUN, at ang mga signal ng tawag mula sa mga palapag sa ibaba ng paradahan ng sasakyan ay kasama ang relay RUV. Matapos mapili ang direksyon, kasabay ng RUV o LVL relay, ang isa sa kabaligtaran na direksyon na humaharang sa mga relay ay RBV o RBN, na nakakaabala sa output sa pamamagitan ng sectional circuit ng mga hindi lumilipas na signal ng tawag kasama ang mga contact nito.
Sa scheme na ipinapakita sa fig. 2, a, upang mapababa ang mga pasahero, ang cabin ay pumupunta nang walang tigil sa pinakamataas na palapag ng pag-uusap at pagkatapos ay bumaba nang may pagpasa, at sa diagram na ipinapakita sa fig. 2, b, kung kinakailangan upang kunin ang mga pasahero, ang cabin ay pumupunta sa pinakamababang palapag ng tawag, pagkatapos ay tumataas nang may mga passing stop.
Sa isinasaalang-alang na mga scheme, ang mga tagapili ay ginawa sa mga elemento ng relay. Kasama nito, ginagamit ang iba pang mga tagapili: cam, photoelectric, tuluy-tuloy na pagsubaybay sa brush, pagtapak, sa mga static na elemento, atbp.
Sa malalaking daloy ng pasahero, maraming elevator ang naka-install sa isang koridor, na pinagsama ang kontrol sa mga pares o grupo upang madagdagan ang ginhawa at mapabuti ang kapangyarihan. Ang bilang ng mga elevator na konektado sa mga grupo ay karaniwang hindi lalampas sa apat, ngunit mas madalas na tatlo, bagaman ang mga system ay kilala na naglalaman ng hanggang walong elevator sa isang grupo.
Sa kontrol ng grupo, karaniwang may tatlong pangunahing mode ng pagpapatakbo ng elevator: peak ascent, peak descent, at balanseng paggalaw sa magkabilang direksyon. Ang pag-activate ng mga elevator para sa isa o ibang mode ay isinasagawa ng dispatcher o awtomatiko sa pamamagitan ng programming clock na naka-install para sa bawat pangkat ng mga elevator.
Sa matataas na gusali, ang bawat pangkat ng mga elevator ay naayos upang maglingkod sa isang tiyak na lugar ng mga palapag, ang iba pang mga palapag ay hindi pinaglilingkuran nito. Kung mayroong ilang mga elevator sa grupo na nagsisilbi sa isang lugar o isang mababang gusali, upang mapataas ang average na bilis ng paggalaw sa pamamagitan ng pagbawas sa bilang ng mga hinto, maaaring maglaan ng mga hiwalay na elevator upang magsilbi sa pantay at kakaibang mga palapag.
Upang maisagawa ang dalawahan o pangkat na kontrol ng mga elevator, ang kanilang mga control circuit ay dapat na sama-sama at ang mga tawag sa bawat palapag sa parehong direksyon ay dapat na nakarehistro nang hiwalay sa bawat direksyon sa pamamagitan ng angkop na mga storage device na naglalaman ng mga relay, transistor, atbp.
Bilang isang halimbawa na sumasalamin sa mga detalye ng operasyon sa ipinares na kontrol ng mga elevator na may karagdagang mga parking relay ng unang elevator 1PC at ang pangalawang elevator 2PC, isaalang-alang ang isang fragment ng schematic diagram na ipinapakita sa fig. 3.
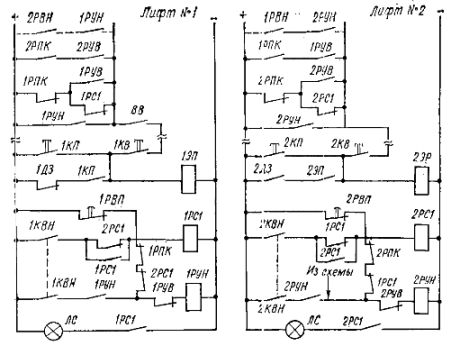
kanin. 3. Fragment ng isang schematic diagram ng nakapares na elevator control: ER — floor relay, RPK — channel switching relay, RVP automatic start relay
Sa kasong ito, ang kotse na bumaba kasama ng mga pasahero sa unang palapag ay hindi sumasagot sa mga tawag mula sa ibang mga palapag at naghihintay ng mga pasahero. Kung walang sasakyan sa unang palapag, ang kotse na tumaas ayon sa order at inilabas ay awtomatikong ipapadala sa unang palapag, at kapag ang isa pang sasakyan ay ibinaba o naka-park, ang huli ay mananatili sa sahig sa dulo ng flight o pumunta sa loading center at ginagamit para sa operasyon ng tawag pangunahin sa direksyon ng paglubog.
Ang unang palapag na cabin parking relay 1PC1 o 2PC1 ay naka-on pagkatapos ng pagdating ng unang palapag na cabin mula sa limit switch 1KVN o 2KVN (naka-install sa mga minahan ng copier). Ang mga relay na ito ay naharang.Samakatuwid, ang pagsasama ng isa sa mga ito ay nagpapahiwatig na ang kotse na ito ay dumating sa unang palapag nang mas maaga kaysa sa isa. Sa kasong ito, ang relay ng 1PC1 o 2PC1 kasama ang pagsasara ng contact nito ay nakabukas sa LS signal lamp at sa pagbubukas ng contact nito ay sinira ang ringing circuit ng elevator nito, na nakakaabala sa tawag habang nakaparada ang kotse sa unang palapag.
Kapag ang kotse ay umalis sa unang palapag, ang LS signal lamp nito ay namatay, ang kapangyarihan sa tinatawag na mga circuit ng elevator na ito ay naibalik kaagad pagkatapos na mailabas ang kotse, at pagkatapos ng kotse ng isa pang elevator ay dumating sa unang palapag, ang computer relay nito ay binuksan. Ang cabin na ito ay nananatili sa ground floor at naghihintay ng mga pasahero (na sinenyasan ng pag-iilaw ng LS warning lamp). Kapag ang kotse na tumaas sa order ay inilabas at walang mga tawag, isang senyales ang ipinapadala sa circuit na nag-on sa relay coils 1RUN o 2RUV 1RUN o 2RUV sa pamamagitan ng pagbubukas ng mga contact ng limit switch 1KVN o 2KVN, at ang kotse papunta sa unang palapag, at t .n.
Ang motor control equipment ng tipikal na single, double at group control elevator ay karaniwang matatagpuan sa mga tipikal na panel, istasyon o control unit na naka-install sa mga machine room.