Kontrol sa antas ng tubig sa tangke gamit ang OWEN PR110 na programmable relay
Ang PR110 controller ay ginawa ng kumpanya ng Russia na "OWEN". Ang controller ay gumaganap ng mga operasyon sa mga discrete signal lamang — ang pangunahing layunin nito ay palitan ang mga simpleng control system batay sa relay logic. Tinutukoy nito ang katotohanan na ito (pati na rin ang iba pang mga controllers na may katulad na mga function) ay itinalaga ang pangalan na «Programmable relay».

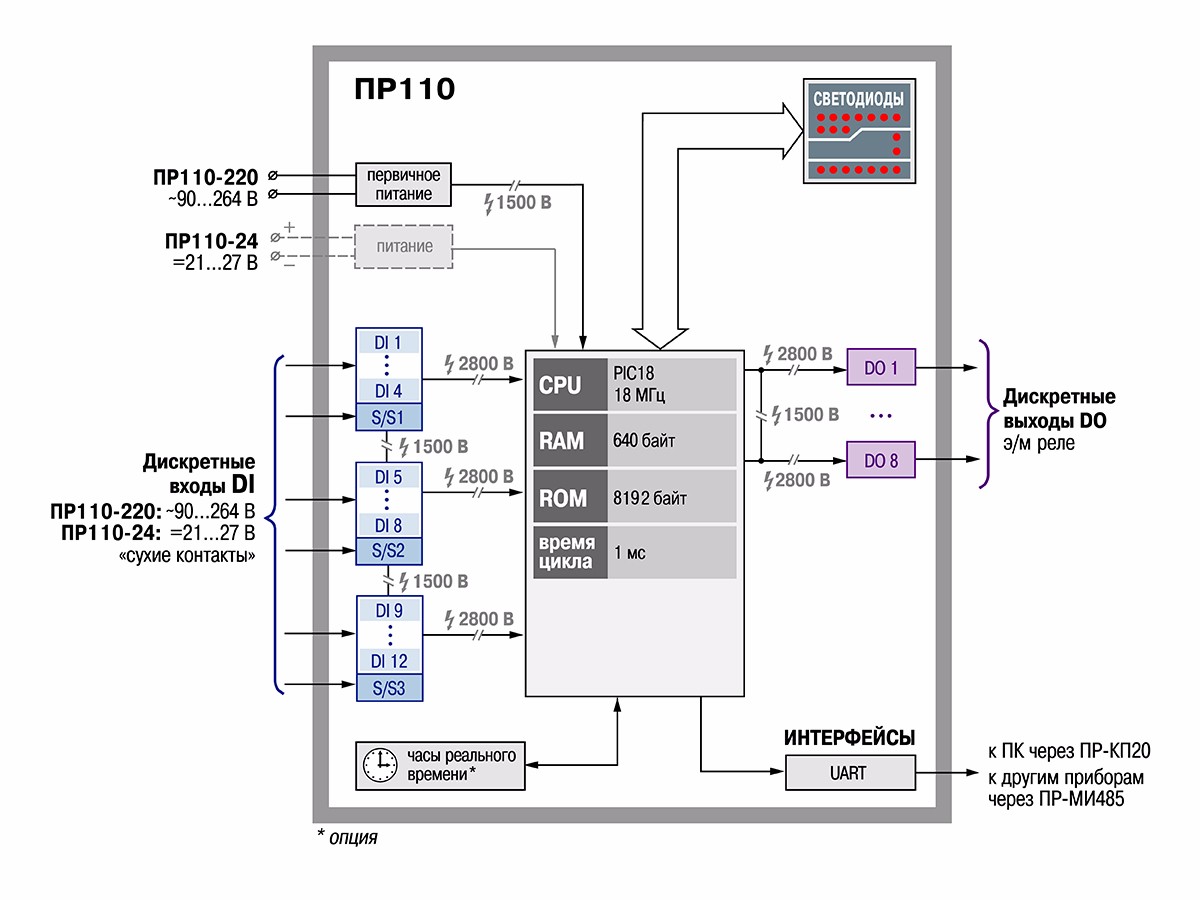
ARIES PR110 Programmable Relay Functional Diagram:
Ang pangunahin at tanging tool para sa programming at debugging controller software ay isang personal na computer. Sa tulong nito, hindi ka lamang makakalikha ng software ng kaukulang controller, ngunit, bilang panuntunan, obserbahan din kung paano ito gumagana gamit ang computer simulation.

Titingnan natin ang proseso ng paglikha ng switching control program para sa PR110 programmable relay gamit ang halimbawa ng water level control system sa isang tangke.
Mga teknikal na kondisyon
Kinakailangan na ipatupad ang isang sistema ng kontrol para sa pagpuno ng tangke ng tubig. Ang pagganap ng ilang mga pag-andar ay tinutukoy ng estado ng mga antas ng sensor, ang ilang mga pag-andar ng operator. Dapat ay may maliwanag na indikasyon ng kasalukuyang katayuan ng system.
Ang control algorithm ay ang mga sumusunod. Mayroong tatlong mga sensor na tumutukoy sa kasalukuyang antas ng tubig sa tangke: itaas, gitna at ibaba. Ang bawat sensor ay na-trigger (naglalabas ng antas ng logic unit sa output) kapag ang tubig ay lumampas sa katumbas na antas.
Ang manu-manong kontrol ay isinasagawa gamit ang dalawang mga pindutan: «Start» at «Stop». Kapag ang tangke ay walang laman (ang antas ng tubig ay nasa ibaba ng mas mababang antas ng mga sensor), ang pulang ilaw ng tagapagpahiwatig ay dapat na maging matatag, kapag ito ay puno (sa itaas ng itaas), dapat itong maging matatag na berde. Dalawang bomba ang kinokontrol.
Ang mga bomba ay maaaring simulan kung ang tangke ay hindi puno (ang antas ng tubig ay nasa ibaba ng tuktok). Kung sa pamamagitan ng pagpindot sa pindutan ng «Start» ang antas ng tubig ay mas mababa sa average - ang parehong mga bomba ay sinimulan, kung sa pamamagitan ng pagpindot sa pindutan ng «Start» ang antas ng tubig ay higit sa average - isang bomba ang sinimulan.
Ang pag-on sa mga bomba ay sinamahan ng isang kumikislap na berdeng tagapagpahiwatig. Kapag ang tangke ay puno na (ang antas ng tubig ay umabot sa itaas na antas), ang mga bomba ay awtomatikong patayin. Kung ang tangke ay walang laman (ang antas ng tubig ay nasa ibaba ng mas mababang antas), hindi posible na patayin ang mga bomba sa pamamagitan ng pagpindot sa pindutan ng «Stop».
Isang halimbawa ng paglikha ng isang programa sa OWEN Logic
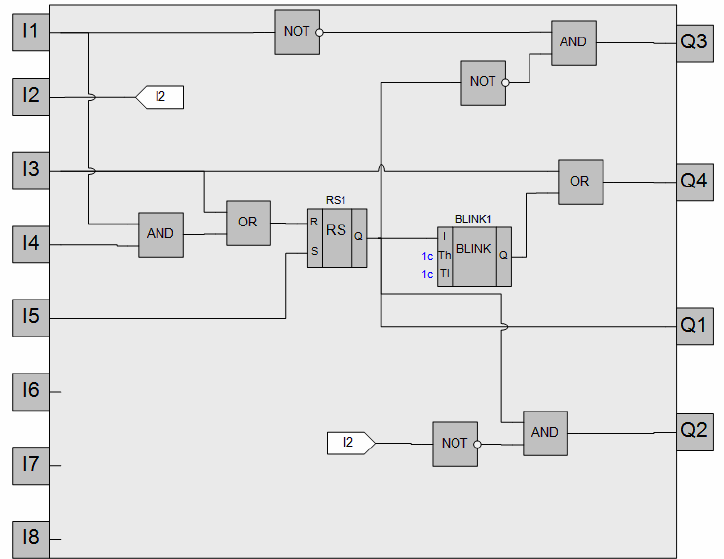
Upang magawa ang gawaing ito, ang control machine ay dapat magkaroon ng limang discrete input at apat na relay output. Upang malutas ang problemang ito, gagawin namin ang mga sumusunod na desisyon.
Ikonekta ang lower tank water level sensor sa input I1, ang middle level sensor sa input I2 at ang upper level sensor sa input I3.Ikonekta ang Stop button sa input I4 at ang Start button sa input I5. Kokontrolin namin ang pagsasama ng pump No. 1 sa tulong ng output Q1, ang pagsasama ng pump No. 2 — sa tulong ng output Q2. Ikonekta ang pulang indicator sa output Q3, ang berdeng indicator sa output Q4.
Ang manu-manong kontrol ay isinasagawa sa pamamagitan ng mga pindutan na bumubuo ng mga panandaliang signal ng kontrol. Upang manatili ang control system sa isang estado kung saan ililipat namin ito nang may panandaliang signal mula sa isa o isa pang button, kailangan ng trigger sa programa.
Ipakilala natin ang flip-flop RS1 sa programa. Ang output ng flip-flop na ito ay nakatakda sa isa kapag ang isang positibong gilid ay dumating sa input S at ni-reset sa zero kapag ang isang positibong gilid ay dumating sa input R. Dapat tandaan na kapag ang isa ang mga signal ay dumating sa mga input, ang R input signal ay priyoridad.
Kung ang antas ng tubig sa tangke ay mas mataas kaysa sa itaas o pinindot namin at hinawakan ang "Stop" na buton sa estadong ito, pagkatapos ay ang pagpindot sa "Start" na pindutan sa oras na iyon ay hindi dapat i-on ang mga bomba. Samakatuwid, ang pindutan ng «Start» ay konektado sa input S na may mas mababang priyoridad ng flip-flop RS1. Pagkatapos, kung walang mga kundisyon na pumipigil sa pump mula sa pag-on (ibig sabihin, magkakaroon ng logic zero sa R input ng trigger RS1), kapag pinindot ang «Start» button, ang output ng trigger RS1 ay itatakda sa isa. Ang signal na ito ay gagamitin para i-activate ang mga motor.
Sa dalawang pump, ang pump #1 ay dapat na naka-on sa anumang kaso, kaya ang signal mula sa RS1 trigger output ay konektado sa Q1 output. Ang pump #2 ay dapat lang i-on kung ang mid level na sensor ay hindi na-trip. Upang matupad ang kundisyong ito, ipinakilala namin ang inverter at elemento ng lohika AT sa programa.Ang input ng inverter ay konektado sa input I2, ang mga input ng logic element AT sa output ng inverter at sa output ng trigger RS1, ayon sa pagkakabanggit.
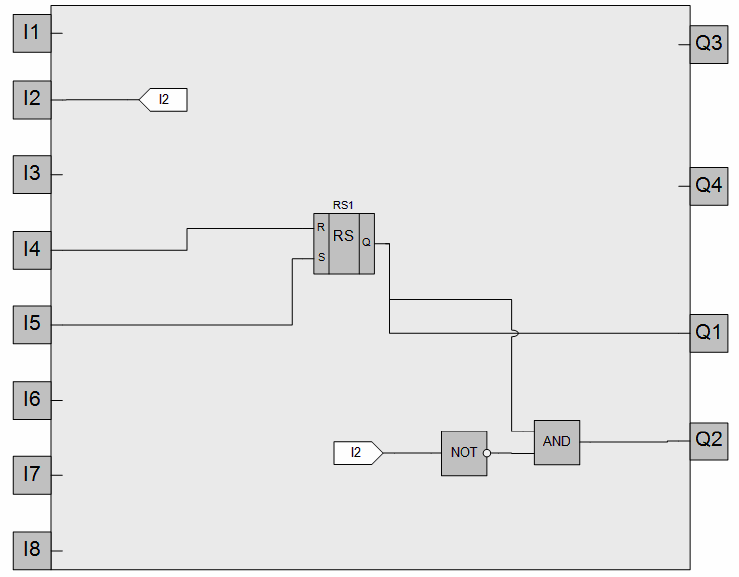
Ang pag-on sa mga bomba ay dapat na sinamahan ng isang kumikislap na berdeng tagapagpahiwatig. Upang makabuo ng panaka-nakang signal para i-on/i-off ang berdeng indicator, ipinakilala namin ang BLINK1 square wave generator sa programa. Sa tab na properties ng block na ito, itakda ang tagal ng isa at zero na signal sa output nito upang maging katumbas at katumbas ng 1s. Ikonekta ang output ng trigger RS1 sa input ng activation ng operasyon ng generator BLINK1.
Ngayon ang BLINK1 generator ay gagana lamang kapag ang trigger output RS1 ay nakatakda sa isa ie. kapag ang mga bomba ay aktibo. 26 Ipasok natin ang OR gate sa programa. Ikinonekta namin ang output nito sa output ng Q4. Ikinonekta namin ang isang input ng OR gate sa output ng generator BLINK1, ang isa pa sa input I3. Ngayon, kapag ang mga bomba ay naka-on, ang berdeng indicator ay kumikislap, ngunit kung ang pinakamataas na antas ng sensor ay na-trigger, ang indicator na ito ay patuloy na naka-on.
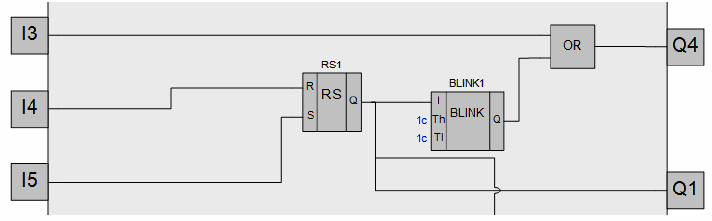
Ang mga bomba ay dapat na patayin kung pinindot natin ang "Stop" na buton at sa parehong oras ang lower level sensor ay nasa logic unit state (presensya na may hindi bababa sa kaunting tubig sa tangke) o kung ang upper level sensor ay na-trigger ( puno ang tangke).
Upang matupad ang mga kundisyong ito, ipinakilala namin ang logic element OR at ang logic element I sa programa. Ikinonekta namin ang isang input ng logic element AT sa "Stop" button, ang isa sa input I1 (na may output ng mas mababang antas sensor). Ikinonekta namin ang isang input ng OR element sa output ng AND element, ang isa sa input I3 (na may output ng upper level sensor). Ang output ng OR element ay konektado sa R input ng flip-flop RS1.
Ang pulang indicator ay dapat na umiilaw kung ang dalawang kundisyon ay natugunan sa parehong oras: ang mga bomba ay hindi gumagana (zero ay naroroon sa output ng trigger RS1) at ang antas ng tubig ay nasa ibaba ng mas mababang antas (mayroong zero sa output ng ang mas mababang antas ng sensor).
Upang "suriin" ang mga kundisyong ito at kontrolin ang pulang tagapagpahiwatig sa programa, ipinakilala namin ang dalawang inverters at isang elemento ng logic I. Ang input ng isang inverter ay konektado sa input I1 (na may output ng lower level sensor), ang input ng ang iba pang inverter - na may trigger output RS1). Ikinonekta namin ang mga output ng inverters sa mga input ng AND gate. Ang output ng AND gate ay konektado sa output ng Q3.

Sa huli, sa pangkalahatan, dapat mong ipakita ang programa sa ibaba. Ang figure ay pansamantalang nagpapakita ng mga panlabas na circuit na konektado sa isang programmable relay.
Gamit ang emulation mode ng OWEN Logic programming environment, tiyaking gumagana ang program ayon sa orihinal na gawain. Pagkatapos i-load ang programa sa relay, tiyaking pareho.