Encoder — Mga rotary angle sensor
 Ang pagpoposisyon sa iba't ibang uri ng kagamitang pang-industriya ay ibinibigay gamit ang mga simpleng device — mga encoder (o sa madaling salita, mga sensor ng anggulo).
Ang pagpoposisyon sa iba't ibang uri ng kagamitang pang-industriya ay ibinibigay gamit ang mga simpleng device — mga encoder (o sa madaling salita, mga sensor ng anggulo).
Ang mga encoder ay ginagamit upang i-convert ang linear o rotary motion sa isang binary digital signal. Ang isang encoder ay isang aparato na ang baras ay konektado sa umiikot na baras ng bagay na pinag-aaralan at nagbibigay ng elektronikong kontrol sa anggulo ng pag-ikot ng huli. Ayon sa prinsipyo ng operasyon, ang mga encoder ay nahahati sa optical at magnetic.
Sa baras ng optical encoder mayroong isang disc na may mga pasulput-sulpot na bintana sa paligid ng perimeter, kung saan mayroong isang LED at isang phototransistor, na tinitiyak ang pagbuo ng isang output signal sa anyo. hugis-parihaba pulse tren na may dalas na proporsyonal sa parehong bilang ng mga bintana at ang bilis ng pag-ikot ng disk / baras. Ang bilang ng mga pulso ay nagpapahiwatig ng anggulo ng pag-ikot.
Available ang mga optical encoder bilang incremental at absolute encoder.
Ang mga incremental na encoder ay may pasulput-sulpot na disc na may maraming bintana na kapareho ng laki ng base radius at dalawang pagbabasa mga optocoupler, na nagpapahintulot sa iyo na ayusin ang parehong anggulo ng pag-ikot at ang direksyon ng pag-ikot ng baras.Sa dagdag na radius ng disc mayroong isang solong break window at isang kaukulang optocoupler na tumutukoy sa panimulang posisyon (tahanan).
Negative Torque - Ang mga incremental na encoder ay nagbibigay ng isang kamag-anak na pagbabasa ng anggulo ng pag-ikot, impormasyon tungkol sa kung saan ay hindi nai-save kapag ang pag-ikot ay tumigil. Kasama sa kanilang mga pakinabang ang pagiging simple ng disenyo (at, nang naaayon, mababang gastos) sa mataas na resolusyon at mataas na dalas ng pagpapatakbo.
Ang mga incremental na encoder na may tumaas na tibay ay nakatuon sa mga pang-industriyang aplikasyon - sa mechanical engineering, rolling mill, paggawa ng barko, tela, kasuotan sa paa, woodworking. Para sa mga naturang encoder, ang mga mapagpasyang parameter ay ang resolution sa anggulo ng pag-ikot, ang kakayahang magtrabaho sa mataas na frequency, isang mataas na antas ng proteksyon upang mapaglabanan ang mga kondisyon ng malupit na kapaligiran.
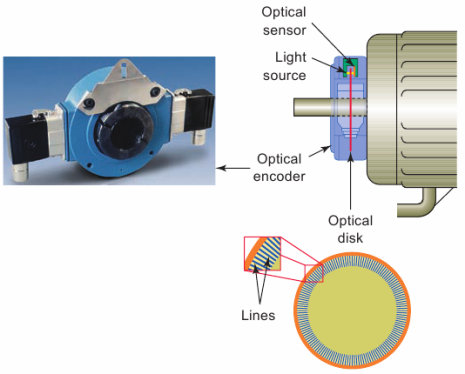
Isang disc na may mga linya o notch na nakakaabala sa light beam sa optical sensor. Nararamdaman ng isang electronic circuit ang beam break at bumubuo ng mga digital output pulse mula sa encoder.
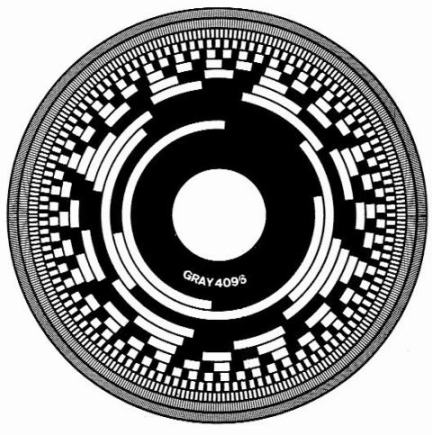
Encoding disk — isang aparato para sa pag-convert ng mga angular na displacement ng shaft sa digital form. Ang isang geometric na imahe ng isang digital code ay inilapat sa encoding disk. Ang mga simbolo ng code bit ay inilalapat sa isang concentric na track, at ang hindi gaanong makabuluhang (hindi gaanong makabuluhan) na mga bit ay matatagpuan mas malapit sa periphery.
Depende sa paraan ng pagbabasa ng code (contact, photoelectric, electromagnetic, induction, electrostatic, atbp.), Ang geometric na imahe ng code ay binubuo ng electrically conductive at electrically insulated, transparent at opaque, magnetic at non-magnetic, atbp.
Ang pinakalaganap ay ang pag-encode ng mga disk na may mga uri ng binary code, na hindi kasama ang paglitaw ng mga error kapag tumatawid sa mga hangganan ng hiwalay na mga hiwalay na seksyon, kapag ang ilang mga piraso ay maaaring basahin sa isang gilid ng hangganan, at ang ilan sa kabilang banda (dahil sa hindi tumpak na pag-install ng mga naaalis na device o dahil sa hindi sabay-sabay na read code habang umiikot ang disk Kasama sa mga code na ito ang tinatawag na Fau code (Barker code) at Reflex code (Grey code).
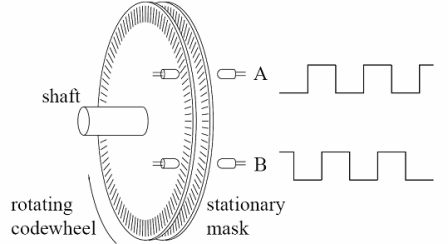
Ang ilang optical rotary encoder ay gumagamit ng reflective encoder disk. Ang disk na ito ay may mga alternating section na sumisipsip o sumasalamin sa liwanag, at ang light source kasama ang receiver ay matatagpuan sa isang gilid ng disk. Kung mayroon lamang isang ilaw na mapagkukunan at receiver, ang pagkakasunud-sunod ng mga pulso mula sa sensor ay nagbibigay-daan sa iyo upang malaman kung gaano karaming mga hakbang ang pinaikot ng disk na may kaugnayan sa nakaraang posisyon nito.
Hindi masasabi ng sensor ang direksyon ng pag-ikot, ngunit kung magdaragdag ka ng pangalawang source-to-receiver na pares, 90 out of phase mula sa una, matutukoy ng microcontroller ang direksyon ng pag-ikot ng disk sa pamamagitan ng phase difference sa pagitan ang pulso ay nagsasanay.
Dapat alalahanin na ang anumang sistema na nakakakita ng kamag-anak na pag-ikot ng disk ngunit hindi masusukat ang ganap na angular na posisyon nito ay isang incremental encoder.
Ang isang absolute encoder ay may discontinuous disk na may concentric windows ng iba't ibang radii na ang mga relatibong laki ay tinutukoy ng binary code at binabasa nang sabay-sabay, na nagbibigay ng naka-code na output signal para sa bawat angular na posisyon (Gray code, binary code...).
Sa kasong ito, posible na makakuha ng data sa agarang posisyon ng baras nang walang digital counter o bumalik sa paunang posisyon, dahil ang output ay may naka-code na salita — «n bit», protektado mula sa ingay ng kuryente.
Ang mga ganap na encoder ay ginagamit sa mga application na nangangailangan ng pag-imbak ng data ng pag-input sa loob ng mahabang panahon, ngunit ang mga ito ay mas kumplikado sa disenyo at mas mahal.
Ang mga ganap na encoder na may interface ng fieldbus ay may interface ng output para sa komunikasyon ng fieldbus alinsunod sa mga pamantayan ng CANopen, ProfiBus, DeviceNet, Ethernet, InterBus at gumagamit ng binary code upang matukoy ang anggulo ng pag-ikot. Ang mga interface ng komunikasyon sa itaas ay naa-program ayon sa isang bilang ng mga parameter: hal. direksyon ng pag-ikot, resolution ng pulso bawat rebolusyon, baud rate.

Ang mga encoder na naka-mount sa motor shaft ay epektibong nagbibigay ng tumpak na kontrol sa pagpoposisyon. Ang ganitong mga encoder ay kadalasang ginawa sa bersyon ng «hole» at ang mga espesyal na coupling ay mahalagang elemento ng kanilang disenyo, na nagbibigay-daan upang mabayaran ang backlash ng motor shaft.
Ang pagpoposisyon sa ilalim ng mga kondisyon sa itaas ay pinaka-epektibong nagbibigay ng magnetic encoder, kung saan ang conversion ng angular displacement ng shaft sa isang electronic signal ay isinasagawa nang hindi nakikipag-ugnay batay sa Hall effect, ay hindi nauugnay sa pag-ikot ng optical chopper sa loob. ang sensor at pinapayagan ang pagpoproseso ng signal na may bilis na hanggang 60,000 rpm.
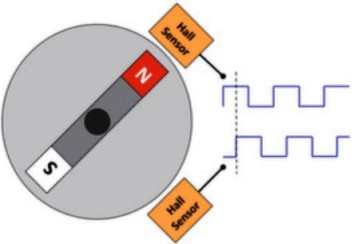
Sa isang magnetic encoder, ang mataas na bilis ng pag-ikot ng isang panlabas na baras, kung saan ang isang permanenteng cylindrical magnet ay naayos, ay nararamdaman ng isang Hall sensor na pinagsama sa isang solong semiconductor na kristal na may isang signal processing controller.
Kapag ang mga pole ng permanenteng magnet ay umiikot sa microcircuit na may Hall sensor ang variable na magnetic induction vector ay nagpapahiwatig ng Hall boltahe, na naglalaman ng impormasyon tungkol sa agarang halaga ng anggulo ng pag-ikot ng baras. Ang microcontroller ay nagbibigay ng mabilis na conversion ng Hall boltahe sa positioning angle parameter.

Ang posibilidad ng naturang conversion na walang direktang mekanikal na koneksyon ng magnet at Hall sensor elemento ay ang pangunahing bentahe ng magnetic encoders, nagbibigay sa kanila ng mataas na pagiging maaasahan at tibay at nagbibigay-daan sa kanila upang gumana nang mahusay sa mga high-speed na application na may kaugnayan sa pang-industriyang automation, pag-print, metalworking. , Pagsusukat at Kagamitan sa Pagsukat.