Selsyns: layunin, aparato, prinsipyo ng pagkilos
 Ang Selsyns ay isang espesyal na uri ng alternating current electrical machine na may kapangyarihan mula sa ilang watts hanggang ilang daang watts (mas mababa sa isang kilowatt). Nagsisilbi sa selsyn upang malayuang ipadala ang mekanikal na anggulo ng pag-ikot nang elektrikal sa pagitan ng mga device na walang mekanikal na koneksyon sa isa't isa.
Ang Selsyns ay isang espesyal na uri ng alternating current electrical machine na may kapangyarihan mula sa ilang watts hanggang ilang daang watts (mas mababa sa isang kilowatt). Nagsisilbi sa selsyn upang malayuang ipadala ang mekanikal na anggulo ng pag-ikot nang elektrikal sa pagitan ng mga device na walang mekanikal na koneksyon sa isa't isa.
Ang bawat selsin ay may stator at rotor kung saan matatagpuan ang alternating current windings. May mga coils na may isang paikot-ikot sa stator at isang paikot-ikot na may tatlong paikot-ikot sa rotor, at kabaligtaran, na may isang paikot-ikot na tatlong paikot-ikot sa stator at isang paikot-ikot na may isang paikot-ikot sa rotor, at sa wakas, na may isang paikot-ikot na may tatlong windings sa stator at may parehong winding sa rotor.
Ayon sa kanilang layunin sa mga scheme ng autoregulation, ang mga selsyn ay nahahati sa:
- mga sensor ng selsyn,
- mga tatanggap ng selsyn
- kaugalian.
Upang maunawaan ang pagpapatakbo ng selsyn, isaalang-alang ang Fig. 1, a.
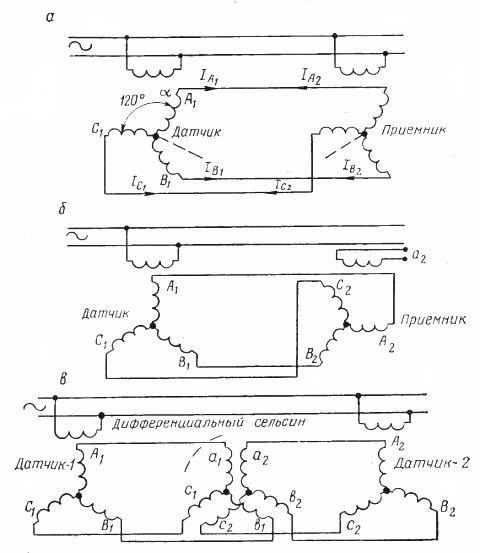
kanin. 1. Mga scheme para sa pag-on ng selsin: a — ayon sa sensor ng system — receiver; b - transpormer receiver sa transpormer mode; c - pagkakaiba
Ang selsyn-sensor at ang selsyn-receiver kasama ang kanilang single-winding stator windings ay konektado sa parehong AC network, at ang tatlong-winding rotor windings ay konektado sa isa't isa. Kung paikutin mo ngayon ang rotor ng sensor sa anumang anggulo, ang rotor ng receiver ay iikot sa parehong anggulo. Kung ang rotor ng sensor ay patuloy na umiikot sa isang random na bilis, ang rotor ng receiver ay iikot sa parehong bilis.
Ang pagkilos ng koneksyon ng Selsin ay batay sa prinsipyo ng electromagnetic induction, na kung saan ay ang mga sumusunod. Ang alternating current sa single-winding stator winding ay nagpapahiwatig ng mga alon sa three-winding rotor winding, ang mga halaga nito ay nakasalalay sa kamag-anak na posisyon ng rotor at stator windings.
Kung ang mga rotor ng dalawang selsin ay pantay na may pagitan na may paggalang sa kanilang mga stator, ang mga alon sa pagkonekta ng mga wire ng rotors ay pantay at kabaligtaran sa bawat isa, at samakatuwid ang kasalukuyang sa bawat likid ay zero. Bilang isang resulta, ang metalikang kuwintas ng baras ng parehong selsyn ay zero.
Kung manu-mano mo na ngayon o kung hindi man ay iikot ang rotor ng selsin sensor sa isang tiyak na anggulo, kung gayon ang balanse ng mga alon sa pagitan ng mga rotor ay maaabala, at ang isang metalikang kuwintas ay lilitaw sa baras ng selsin receiver, dahil sa kung saan ang rotor nito ay iikot. , habang ang kawalan ng balanse ng mga agos ay nawawala. Ibig sabihin, hanggang sa ang rotor na ito ay kumuha ng parehong posisyon bilang ang synchrosensor.

Sa mga sistema ng autoregulation, ang selsyn receiver ay madalas na nagpapatakbo sa transpormer mode (Larawan 1, b). Sa kasong ito, ang rotor ng receiver ay nakapirming nakatigil, at ang stator winding nito ay naka-disconnect mula sa network. Sa coil na ito e ay sapilitan. atbp. v. sa gilid ng rotor, sa pamamagitan ng mga windings kung saan dumadaloy ang mga alon dahil sa posisyon ng rotor ng selsyn sensor.Nangangahulugan ito na ang halaga ng e. atbp. sa mga terminal, ang rotor ng receiver ay proporsyonal sa anggulo ng pag-ikot ng sensor.
Sa paunang posisyon, ang mga rotor ay inilipat ng 90 ° na may kaugnayan sa bawat isa, at sa kasong ito e. atbp. s. ay zero. Ngayon na ang rotor sensor ay pinaikot, e ay sapilitan sa receiver rotor. atbp. may Ep, proporsyonal sa anggulo ng divergence ng mga rotor
Epr = Emax x sinθ
Ang differential selsyn ay ginagamit sa mga kaso kung saan kinakailangan upang makontrol ang pagkakaiba sa mga anggulo ng pag-ikot ng dalawang axes, i.e. kanilang pagkakaiba. Sa kasong ito, ang dalawang selsin sensor ay matatagpuan sa dalawang shaft, ang bilis ng kung saan ay inihambing sa bawat isa. Ang mga rotor ng mga selsin na ito ay konektado sa pamamagitan ng tatlong-winding windings sa tatlong-winding windings ng stator at ang rotor ng ikatlong selsin, na kung saan ay kaugalian (Larawan 1, sa). Ang anggulo ng pag-ikot ng selsyn differential rotor ay katumbas ng pagkakaiba sa pagitan ng mga anggulo ng pag-ikot ng mga selsyn sensor.