Mga kagamitang elektrikal ng mga elevator
 Ang elevator ay isang cyclic lifting machine na idinisenyo para sa patayong pag-angat ng mga tao at kalakal. Sa pamamagitan ng appointment, ang mga elevator ay nahahati sa pasahero, cargo-pasahero, ospital, kargamento.
Ang elevator ay isang cyclic lifting machine na idinisenyo para sa patayong pag-angat ng mga tao at kalakal. Sa pamamagitan ng appointment, ang mga elevator ay nahahati sa pasahero, cargo-pasahero, ospital, kargamento.
Depende sa bilis ng kotse, ang mga elevator ay nahahati sa mababang bilis (hanggang sa 0.71 m / sec), high-speed (mula 1 hanggang 1.6 m / sec), high-speed (mula 2 hanggang 4 m / sec) at high-speed (4 — 10 m / s) ... Ang kapasidad ng pagkarga ng mga elevator ng pasahero ay mula 320 hanggang 1600 kg, mga elevator ng kargamento - mula 160-5000 kg. Sa bilis na hanggang 1.6 m / sec, ang de-koryenteng motor ay konektado sa traction beam sa pamamagitan ng isang gearbox, kung ang bilis ay mas mataas, pagkatapos ay ginagamit ang mga gearless electric drive.

Sa malawak na pagkakaiba-iba ng mga pagpipilian sa disenyo para sa mga elevator ng pasahero at kargamento, ang mga pangunahing aparato para sa mga ito ay hoist, mga lubid, kotse, panimbang, mekanikal na preno at kagamitan sa pagkontrol. Ang mga modernong elevator ay may counterweight suspension system at counterweight rope.

Ang cabin ay gumagalaw sa mga patayong riles.Ang cabin ay sinuspinde mula sa mga lubid na pumapalibot sa towing wire at ginagabayan ang mga pulley ng electric winch drive. Sa dulo ng lubid ay may panimbang na gumagalaw kasama ang mga gabay. Ang counterweight mass ay katumbas ng kabuuan ng cabin mass at (0.42 — 0.5) ang load mass (o kalahati ng pinaka-malamang na cabin load).
Nagmamaneho ng elevator
Sa mga elevator at freight elevator, ang mga uri ng electric drive ay pinili depende sa bilis ng paggalaw, ang bilang ng mga palapag ng gusali at ang kinakailangang katumpakan ng pagpepreno. Ang mga sumusunod na electric drive ay kasalukuyang ginagamit:
a) para sa mga gusali hanggang sa 17 palapag, ang mga low-speed at high-speed elevator na may bilis na 0.7 hanggang 1.4 m / s na may kapasidad ng pag-load na 320, 400 kg ay ginagamit. Gumagamit ang mga elevator na ito ng electric drive na may asynchronous two-speed electric motor na may rotor sa isang squirrel cage,
b) para sa mga high-speed na elevator ng pasahero na may bilis na 1.6 m / s, na inilaan para sa mga gusali hanggang sa 25 palapag, isang electric drive ayon sa thyristor voltage regulator system (TRN) na may two-speed asynchronous motor (TRN-ADD). Ginagamit.

Ang pagkakaroon ng isang adjustable electric drive ay nagsisiguro ng mataas na kinis ng mga proseso ng acceleration at deceleration, mataas na katumpakan ng paghinto sa sahig (hanggang sa 20 mm) at ang kawalan ng isang seksyon na may pinababang bilis bago huminto. Ang pangalawang paikot-ikot ng motor ay ginagamit upang makamit ang mababang bilis sa panahon ng overhaul,
c) para sa mga high-speed at high-speed elevator, ang mga pare-parehong electric drive ayon sa sistema ng motor ng thyristor converter-TP-D at alternating current ayon sa sistema ng frequency converter-short-circuit asynchronous electric motor GGCH-AD ay ginagamit.
Thyristor electric drive mula sa uri ng elevator na ULMP-25-16
Ang power supply ng electric drive (Fig. 1) ay isinasagawa ng isang reversible thyristor voltage regulator UZ (TRN) sa start-up at unipormeng paggalaw at sa pamamagitan ng isang hiwalay na rectifier na binuo ayon sa isang single-phase bridge circuit UZ1 para sa powering ang paikot-ikot na stator sa panahon ng dynamic na pagpepreno.
Ang system ay nagbibigay ng parametric phase control ng rotational speed ng isang squirrel-cage induction motor. Ang awtomatikong sistema ng kontrol ay ginawa sa isang single-chip microcomputer ng uri ng KR1816VB031, na gumaganap ng direktang digital na kontrol ng bilis ng pag-ikot ng isang two-speed asynchronous electric motor.
Tinitiyak ng awtomatikong sistema ng kontrol ang mataas na katumpakan ng pagpapanatili ng itinakdang bilis at paghinto sa antas ng kinakailangang palapag nang direkta sa set point na walang seksyon na may pinababang bilis. Ang pangalawang paikot-ikot ng motor ay naka-on lamang sa panahon ng overhaul.
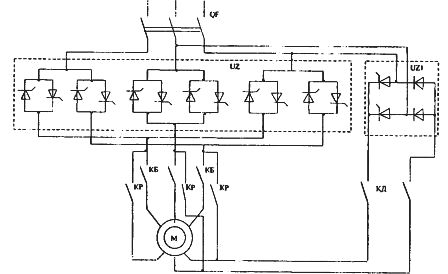
kanin. 1. Scheme ng thyristor electric drive ng elevator
Mga solenoid ng preno
Ang mga mekanismo ng pag-aangat ng mga elevator ay nilagyan ng mga espesyal na aparato sa pagpepreno na may mga short-stroke at short-stroke na direktang kasalukuyang electromagnet, na konektado sa isang 220 o 380 V na network sa pamamagitan ng isang rectifier.
Mga aparatong kontrol sa elevator
Mga switch sa sahig na idinisenyo para sa paglipat ng mga motion control circuit. Nirerehistro nila ang posisyon ng kotse, awtomatikong pinipili ang direksyon ng paggalaw («pataas» o «pababa») at nagbibigay ng utos na patayin ang electric drive kapag nagpepreno.Sa istruktura, ito ay tatlong-posisyon (1-0-2) na mga three-point lever switch (motion control device) na may mga movable (sa lever) sa mga fixed (on-body) na contact.
Ang mga switch sa sahig ay naka-mount sa baras sa antas ng sahig at mayroong isang molded branch sa taksi na kumikilos sa floor switch lever.
Kapag ang cabin ay gumagalaw "pataas" sa pamamagitan ng pag-ikot ng pingga, ang isang grupo ng mga nakapirming contact ay magsasara, at "pababa" - isa pa. Kapag ang kotse ay nasa floor level, ang floor switch ay nasa neutral na posisyon «O» at ang mga fixed contact ay bukas.

Ang mga switch ng bilis ay idinisenyo upang magbigay ng isang salpok upang bawasan ang bilis bago ihinto ang sasakyan. Ginagamit ang mga ito sa mga high-speed elevator na may electric drive na may dalawang bilis na pagpapatupad. Ang mga ito ay binuo sa prinsipyo ng mga switch sa sahig, ngunit may ibang disenyo. Ang mga switch ng bilis ay naka-install sa mine shaft bilang isang kumpletong set sa itaas at ibaba ng sahig sa layo na 0.5 hanggang 0.6 m.
Ang mga switch ng lever ay idinisenyo upang magpatakbo ng mga kontroladong elevator ng kargamento. Sa istruktura, ito ay tatlong-posisyon na mga switch ng lever na may sariling pagbabalik ng hawakan sa neutral na posisyon ("itaas" -0- "ibaba"), na naka-mount sa cabin. Sa pamamagitan ng pag-ikot ng hawakan, napili ang direksyon ng paggalaw, na nakamit sa pamamagitan ng pagsasara ng isang pares ng mga nakapirming contact. Kapag ang hawakan ay inilabas, ang mga contact ay bubukas at ang motor ay hihinto (nakapatay). Ang mga switch ay ginagamit nang sabay-sabay bilang limit switch sa mga dulong posisyon ng taksi. Ito ay nakamit sa pamamagitan ng pagkilos ng pingga sa roller ng mga espesyal na gabay sa baras ng minahan.
Mga inductive sensor na idinisenyo para gamitin sa mga high-speed elevator. Ang diagram ng naturang mga sensor para sa alternating at rectified current ay ipinapakita sa Fig. 2.
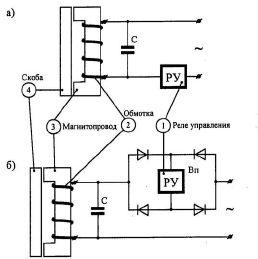
kanin. 2. Schematic diagram ng alternating (a) at rectified (b) kasalukuyang inductive sensors
Ang isang hugis-U na nakalamina na magnetic circuit na gawa sa bakal 3 ay naka-install sa mine shaft, at mayroong isang steel bracket 4 sa cabin, na isang magnetic shunt. Sa magnetic circuit mayroong isang coil na may winding 2, kung saan direktang konektado ang control relay 1 o sa pamamagitan ng isang Vp rectifier. Kapag umalis ang clamp (bubukas ang magnetic circuit), maliit ang inductive resistance ng coil, na titiyakin ang operasyon ng control relay. Kung ang bracket ng bakal ay magkakapatong sa magnetic circuit, ang inductive resistance ng coil ay tumataas nang husto at ang relay ay inilabas.
Ang pagiging maaasahan at kalinawan ng pagpapatakbo ng control relay ay sinisiguro sa pamamagitan ng pagsasama ng capacitance C na kahanay sa coil, na pinili mula sa kondisyon ng pagkuha ng isang mode na malapit sa resonance ng mga alon. Ang paggamit ng isang rectifier upang paganahin ang control relay ay nagpapataas ng pagiging maaasahan ng pagpapatakbo ng magnetic system ng relay.
Bilang karagdagan, ang mga hermetic contact device (reed switch) ay malawakang ginagamit sa mga sensor ng paglalakbay. Ang paggamit ng mga inductive sensor ay nag-aalis ng mga disadvantages ng floor switch at speed switch gaya ng ingay at radio interference na nagmumula sa pagpapatakbo ng mga contact device.
Ang magnetic layering ay isang electromagnetic device na naka-install sa cabin at kinokontrol ang operasyon ng mga lock ng pinto ng minahan. Ang magnetic branch limiter ay konektado sa armature ng branch electromagnet.Kapag ang taksi ay nasa sahig, ang sangay na electromagnet ay na-de-aerated, ang spring-loaded na detent ay nagtatanggal ng lock ng lock ng pinto ng minahan, na nagpapahintulot dito na bumukas.
Kapag gumagalaw, ang electromagnet ng sangay ay pinalakas - ang trangka ay ipinakilala, na nagbabawal sa pagbubukas ng pinto. Ang ganitong mga kandado ay ginagamit sa mga elevator ng lumang disenyo (o moderno) na may manu-manong pagpapatakbo ng pinto ng baras.

Automation ng mga elevator
Ang pangunahing pagkakaiba sa pagitan ng pagpapatakbo ng mga elevator at hoists ay ang kanilang multi-posisyon na posisyon, na ipinahayag sa katotohanan na ang mga mekanismo ay maaaring sakupin ang isang malaking bilang ng mga nakapirming posisyon. Samakatuwid, pagkatapos ng bawat paghinto ay kinakailangan upang malutas ang lohikal na problema ng pagpili ng susunod na hakbang. Ang solusyon sa problemang ito ay kasalukuyang ipinapatupad gamit ang logic chips at microprocessors. Ang mga sumusunod na gawain ay itinakda para sa scheme ng kontrol ng elevator: kontrol sa posisyon ng kotse sa baras, awtomatikong pagpili ng direksyon ng paggalaw, pagpapasiya ng oras ng pagsisimula ng paghinto, tumpak na paghinto ng kotse sa sahig, awtomatikong pagbubukas at pagsasara ng mga pinto at proteksyon ng mga electric drive at elevator.
Ang mga command signal na nagtatakda ng programa ng paggalaw ng kotse ay nahahati sa dalawang uri: "mga order" na nagmumula sa kotse at "mga tawag" na nagmumula sa landing pad. Ang mga utos ay ibinibigay sa pamamagitan ng mga pindutan na matatagpuan sa sabungan at mga lugar sa sahig ayon sa pagkakabanggit. Depende sa tugon sa mga utos at sa mga pamamaraan ng pagproseso ng mga ito, magkaiba ang hiwalay at kolektibong mga scheme ng kontrol.Sa isang hiwalay na prinsipyo ng kontrol, ang circuit ay nakikita at nagsasagawa lamang ng isang utos at sa panahon ng pagpapatupad nito ay hindi tumutugon sa iba pang mga order at tawag.
Ang pamamaraan na ito ay ang pinakasimpleng ipatupad, ngunit nililimitahan ang mga posibleng katangian ng elevator at samakatuwid ay ginagamit lamang para sa mga elevator sa mga gusali ng tirahan hanggang sa siyam na palapag ang taas na may medyo maliit na daloy ng mga pasahero. Sa prinsipyo ng kolektibong kontrol, ang circuit ay tumatanggap ng ilang mga utos nang sabay-sabay at isinasagawa ang mga ito sa isang tiyak na pagkakasunud-sunod, kadalasan sa pagkakasunud-sunod ng mga sahig.

Ang batayan ng sistema ng kontrol ng elevator ay ang pagsukat ng orasan sa sahig. Ang pag-aaral ng orasan ay maaaring isang pendulum, kapag ang pag-aayos ay isinasagawa sa dalawang direksyon, mula sa ibaba pataas at mula sa itaas pababa, at sa isang direksyon, halimbawa, mula lamang sa itaas pababa. Ang pendulum swing ay ginagamit nang mas madalas.