Ang prinsipyo ng pagpapatakbo at ang aparato ng de-koryenteng motor
Ang anumang de-koryenteng motor ay idinisenyo upang magsagawa ng mekanikal na trabaho dahil sa pagkonsumo ng kuryente na inilapat dito, na kadalasang na-convert sa rotary motion. Bagaman sa teknolohiya mayroong mga modelo na agad na lumikha ng isang kilusang pagsasalin ng katawan ng pagtatrabaho. Ang mga ito ay tinatawag na linear motors.
Sa mga pang-industriya na pag-install, ang mga de-koryenteng motor ay nagtutulak ng iba't ibang mga metal-cutting machine at mga mekanikal na aparato na kasangkot sa proseso ng teknolohikal na produksyon.
Sa loob ng mga gamit sa bahay, ang mga de-koryenteng motor ay nagpapatakbo ng mga washing machine, vacuum cleaner, computer, hair dryer, mga laruan ng bata, orasan, at marami pang ibang device.

Mga pangunahing pisikal na proseso at prinsipyo ng pagkilos
Kapag lumipat sa loob magnetic field Ang mga electric charge, na tinatawag na electric currents, ay laging may mekanikal na puwersa na may posibilidad na ilihis ang kanilang direksyon sa isang eroplano na patayo sa oryentasyon ng mga linya ng magnetic field.Kapag ang isang electric current ay dumaan sa isang metal wire o isang coil na gawa dito, ang puwersang ito ay may posibilidad na ilipat/paikutin ang bawat kasalukuyang-carrying wire at ang buong coil sa kabuuan.
Ang larawan sa ibaba ay nagpapakita ng isang metal na frame na may kasalukuyang dumadaloy dito. Ang magnetic field na inilapat dito ay lumilikha ng puwersa F para sa bawat sangay ng frame, na lumilikha ng rotational motion.

Ang pag-aari na ito ng pakikipag-ugnayan ng electric at magnetic na enerhiya, batay sa paglikha ng isang electromotive force sa isang closed conducting loop, ay inilalagay sa operasyon sa bawat electric motor. Kasama sa disenyo nito ang:
-
isang coil kung saan dumadaloy ang isang electric current. Ito ay inilalagay sa isang espesyal na anchor core at naayos sa mga rotary bearings upang mabawasan ang paglaban sa mga frictional forces. Ang disenyong ito ay tinatawag na rotor;
-
stator, na lumilikha ng isang magnetic field, na kasama ng mga linya ng puwersa nito ay tumagos sa mga singil sa kuryente na dumadaan sa mga pagliko ng rotor winding;
-
pabahay para sa paglalagay ng stator. Sa loob ng katawan, ang mga espesyal na upuan ay ginawa, sa loob kung saan ang mga panlabas na hawla ng rotor bearings ay naka-mount.
Ang pinasimple na disenyo ng pinakasimpleng de-koryenteng motor ay maaaring katawanin ng isang larawan ng sumusunod na anyo.

Kapag ang rotor ay umiikot, ang isang metalikang kuwintas ay nabuo, ang kapangyarihan nito ay nakasalalay sa pangkalahatang disenyo ng aparato, ang halaga ng inilapat na elektrikal na enerhiya at ang mga pagkalugi nito sa panahon ng mga conversion.
Ang magnitude ng maximum na posibleng torque power ng motor ay palaging mas mababa kaysa sa elektrikal na enerhiya na inilapat dito. Ito ay nailalarawan sa pamamagitan ng halaga ng kahusayan.
Mga uri ng mga de-koryenteng motor
Ayon sa uri ng kasalukuyang dumadaloy sa mga coils, nahahati sila sa DC o AC motors.Ang bawat isa sa dalawang pangkat na ito ay may malaking bilang ng mga pagbabago gamit ang iba't ibang teknolohikal na proseso.
Mga DC motor
Mayroon silang stator magnetic field na nilikha ng isang nakapirming nakapirming permanenteng magneto o mga espesyal na electromagnet na may mga coils ng paggulo. Ang armature coil ay matatag na naka-mount sa baras, na naayos sa mga bearings at maaaring malayang iikot sa paligid ng sarili nitong axis.
Ang pangunahing istraktura ng naturang engine ay ipinapakita sa figure.

Sa core ng armature, na gawa sa mga ferromagnetic na materyales, mayroong isang coil na binubuo ng dalawang bahagi na konektado sa serye, na konektado sa conducting collector plate sa isang dulo at konektado sa isa't isa sa isa pa. Matatagpuan ang dalawang graphite brush sa magkatapat na dulo ng armature at idiniin sa mga contact pad ng collector plate.
Ang isang positibong potensyal na mapagkukunan ng DC ay inilalapat sa mas mababang pattern ng brush at isang negatibong potensyal sa itaas. Ang direksyon ng kasalukuyang dumadaloy sa coil ay ipinapakita ng isang putol-putol na pulang arrow.
Ang kasalukuyang nagiging sanhi ng magnetic field na magkaroon ng north pole sa ibabang kaliwa ng armature, at isang south pole sa kanang itaas ng armature (gimbal rule). Nagreresulta ito sa pagtanggi ng mga rotor pole mula sa mga nakatigil na may parehong pangalan at pagkahumaling sa kabaligtaran na mga pole ng stator. Bilang resulta ng inilapat na puwersa, ang isang rotational na paggalaw ay nangyayari, ang direksyon kung saan ay ipinahiwatig ng isang brown na arrow.
Sa karagdagang pag-ikot ng armature sa pamamagitan ng pagkawalang-galaw, ang mga pole ay inililipat sa iba pang mga plate ng kolektor. Ang direksyon ng kasalukuyang sa kanila ay baligtad. Ang rotor ay patuloy na umiikot pa.
Ang simpleng disenyo ng naturang collector device ay humahantong sa malaking pagkalugi ng elektrikal na enerhiya.Ang ganitong mga motor ay gumagana sa mga aparato ng simpleng disenyo o mga laruan para sa mga bata.
Ang direktang kasalukuyang mga de-koryenteng motor na kasangkot sa proseso ng produksyon ay may mas kumplikadong disenyo:
-
ang likid ay nahahati hindi sa dalawa, ngunit sa maraming bahagi;
-
ang bawat seksyon ng coil ay naka-mount sa sarili nitong poste;
-
ang aparato ng kolektor ay ginawa gamit ang isang tiyak na bilang ng mga contact pad ayon sa bilang ng mga windings.
Bilang resulta, ang isang maayos na koneksyon ng bawat poste sa pamamagitan ng mga contact plate nito sa mga brush at ang kasalukuyang pinagmumulan ay nalikha at ang mga pagkalugi ng enerhiya ay nabawasan.
Ang aparato ng naturang anchor ay ipinapakita sa larawan.
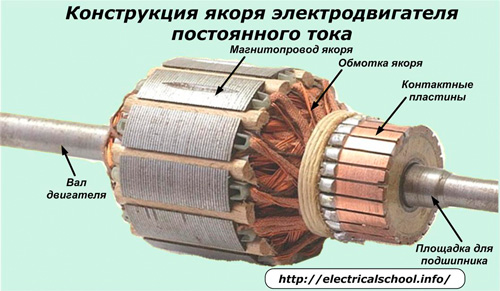
Sa DC motors, ang direksyon ng pag-ikot ng rotor ay maaaring baligtarin. Upang gawin ito, sapat na upang baguhin ang paggalaw ng kasalukuyang sa likid sa kabaligtaran sa pamamagitan ng pagbabago ng polarity sa pinagmulan.
Mga AC motor
Naiiba sila sa mga naunang disenyo dahil ang electric current na dumadaloy sa kanilang coil ay inilalarawan ng sinusoidal harmonic na bataspana-panahong pagbabago ng direksyon nito (sign). Upang paganahin ang mga ito, ang boltahe ay ibinibigay mula sa mga generator na may mga alternating sign.
Ang stator ng naturang mga motor ay ginagampanan ng isang magnetic circuit. Ito ay gawa sa ferromagnetic plate na may mga grooves kung saan ang mga liko ng coil ay inilalagay na may isang frame (coil) configuration.

Kasabay na mga de-koryenteng motor
Ang larawan sa ibaba ay nagpapakita ng prinsipyo ng pagpapatakbo ng isang single-phase AC motor na may kasabay na pag-ikot ng mga electromagnetic field ng rotor at stator.

Sa mga grooves ng magnetic circuit ng stator sa diametrically kabaligtaran dulo, paikot-ikot na mga wire ay inilalagay, schematically ipinapakita sa anyo ng isang frame kung saan ang isang alternating kasalukuyang daloy.
Isaalang-alang natin ang kaso ng sandali sa oras na tumutugma sa pagpasa ng positibong bahagi ng kalahating alon nito.
Sa mga cell ng tindig, ang isang rotor na may built-in na permanenteng magnet ay malayang umiikot, kung saan ang hilagang «N mouth» at ang southern «S mouth» ng poste ay malinaw na tinukoy. Kapag ang isang positibong kalahating alon ng kasalukuyang dumadaloy sa paikot-ikot na stator, isang magnetic field na may mga pole na «S st» at «N st» ay nilikha sa loob nito.
Ang mga puwersa ng pakikipag-ugnayan ay bumangon sa pagitan ng mga magnetic field ng rotor at ng stator (na ang mga pole ay nagtataboy at hindi katulad ng mga pole na umaakit) na may posibilidad na i-on ang armature ng motor mula sa anumang posisyon hanggang sa sukdulan kapag ang mga kabaligtaran na pole ay matatagpuan nang malapit hangga't maaari sa isa't isa. isa pa.
Kung isasaalang-alang natin ang parehong kaso, ngunit sa sandaling ang kabaligtaran - isang negatibong kalahating alon ng kasalukuyang dumadaan sa frame wire, kung gayon ang pag-ikot ng armature ay magaganap sa kabaligtaran na direksyon.
Upang matiyak ang tuluy-tuloy na paggalaw ng rotor sa stator, hindi isang paikot-ikot na frame ang ginawa, ngunit isang tiyak na bilang ng mga ito, na ibinigay na ang bawat isa sa kanila ay pinalakas ng isang hiwalay na kasalukuyang pinagmulan.
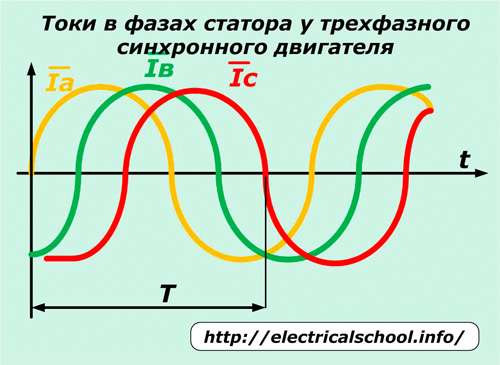
Ang prinsipyo ng pagtatrabaho ng isang three-phase AC motor na may kasabay na pag-ikot, ang mga electromagnetic field ng rotor at stator ay ipinapakita sa sumusunod na larawan.

Sa disenyo na ito, tatlong coils A, B at C ay naka-mount sa loob ng stator magnetic circuit, na na-offset ng mga anggulo ng 120 degrees sa bawat isa. Ang coil A ay minarkahan ng dilaw, ang B ay berde, at ang C ay pula. Ang bawat coil ay ginawa gamit ang parehong mga frame tulad ng sa nakaraang kaso.
Sa larawan, sa anumang kaso, ang kasalukuyang dumadaloy sa isang likid lamang sa pasulong o pabalik na direksyon, na ipinahiwatig ng mga palatandaan na «+» at «-«.
Kapag ang positibong kalahating alon ay dumaan sa phase A sa pasulong na direksyon, ang axis ng rotor field ay tumatagal ng isang pahalang na posisyon, dahil ang mga magnetic pole ng stator ay nabuo sa eroplanong ito at umaakit sa movable armature. Ang mga kabaligtaran na pole ng rotor ay may posibilidad na lumapit sa mga pole ng stator.
Kapag ang positive half wave ay napunta sa phase C, ang armature ay iikot ng 60 degrees clockwise. Sa sandaling mailapat ang kasalukuyang sa phase B, magaganap ang isang katulad na pag-ikot ng armature. Ang bawat kasunod na kasalukuyang daloy sa susunod na yugto ng susunod na paikot-ikot ay magpapaikot sa rotor.
Kung ang isang three-phase mains boltahe na inilipat sa pamamagitan ng isang anggulo ng 120 degrees ay inilapat sa bawat paikot-ikot, pagkatapos ay ang mga alternating na alon ay magpapalipat-lipat sa kanila, na magpapaikot sa armature at lumikha ng kasabay na pag-ikot nito sa inilapat na electromagnetic field.
Ang parehong mekanikal na disenyo ay matagumpay na ginagamit sa isang three-phase stepper motor... Tanging sa bawat paikot-ikot sa pamamagitan ng kontrol espesyal na controller (stepper motor driver) Ang mga patuloy na pulso ay inilalapat at inalis ayon sa algorithm na inilarawan sa itaas.
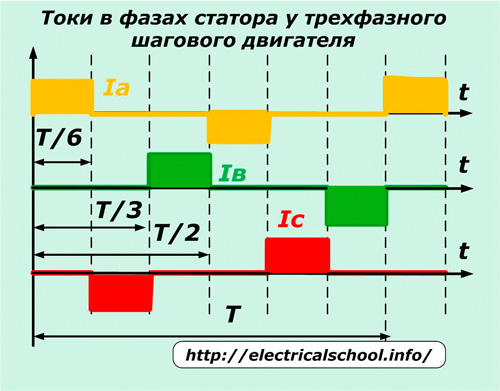
Ang kanilang start-up ay nagsisimula ng isang rotational na paggalaw, at ang kanilang pagwawakas sa isang tiyak na punto ng oras ay nagbibigay ng isang sinusukat na pag-ikot ng baras at isang paghinto sa isang naka-program na anggulo upang maisagawa ang ilang mga teknolohikal na operasyon.
Sa parehong tatlong-phase system na inilarawan, posible na baguhin ang direksyon ng pag-ikot ng armature. Upang gawin ito, kailangan mo lamang baguhin ang pagkakasunud-sunod ng mga phase «A» — «B» — «C» sa isa pa, halimbawa «A» — «C» — «B».
Ang bilis ng rotor ay kinokontrol ng haba ng panahon T. Ang pagbawas nito ay humahantong sa isang acceleration ng pag-ikot.Ang magnitude ng amplitude ng kasalukuyang sa phase ay depende sa panloob na paglaban ng paikot-ikot at ang halaga ng boltahe na inilapat dito. Tinutukoy nito ang dami ng metalikang kuwintas at kapangyarihan ng de-koryenteng motor.
Mga asynchronous na motor
Ang mga disenyo ng motor na ito ay may parehong stator magnetic circuit na may mga windings tulad ng sa naunang tinalakay na single-phase at three-phase na mga modelo. Nakuha nila ang kanilang pangalan mula sa asynchronous rotation ng armature at stator electromagnetic field. Ginagawa ito sa pamamagitan ng pagpapabuti ng pagsasaayos ng rotor.
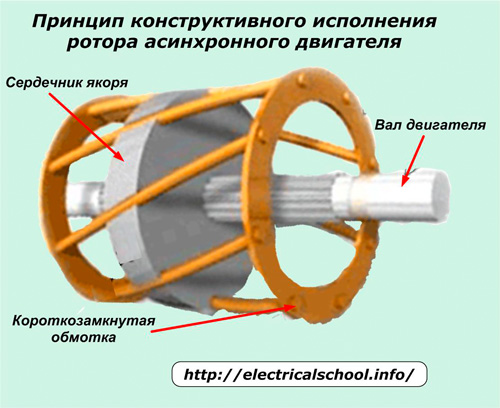
Ang core nito ay gawa sa mga grooved electrical steel plates. Ang mga ito ay nilagyan ng mga kasalukuyang conductor ng aluminyo o tanso, na sarado sa mga dulo ng armature na may mga conductive ring.
Kapag ang boltahe ay inilapat sa stator windings, isang electric current ay sapilitan sa rotor winding sa pamamagitan ng electromotive force at isang armature magnetic field ay nalikha. Kapag ang mga electromagnetic field na ito ay nakikipag-ugnayan, ang motor shaft ay nagsisimulang umikot.
Sa disenyo na ito, ang paggalaw ng rotor ay posible lamang pagkatapos ng paglitaw ng isang umiikot na electromagnetic field sa stator, at nagpapatuloy ito sa isang asynchronous na mode ng operasyon kasama nito.
Ang mga asynchronous na motor ay mas simple sa disenyo. Samakatuwid, ang mga ito ay mas mura at malawakang ginagamit sa mga pang-industriya na pag-install at mga gamit sa bahay.

ABB explosion-proof na de-koryenteng motor
Mga linear na motor
Maraming mga nagtatrabaho na katawan ng mga mekanismong pang-industriya ang nagsasagawa ng reciprocating o translational na paggalaw sa isang eroplano, na kinakailangan para sa pagpapatakbo ng mga makinang metalworking, mga sasakyan, mga suntok ng martilyo kapag nagmamaneho ng mga tambak ...
Ang paglipat ng naturang gumaganang katawan sa pamamagitan ng mga gearbox, ball screw, belt drive at mga katulad na mekanikal na aparato mula sa isang rotary electric motor ay nagpapalubha sa disenyo. Ang modernong teknikal na solusyon sa problemang ito ay ang pagpapatakbo ng isang linear electric motor.
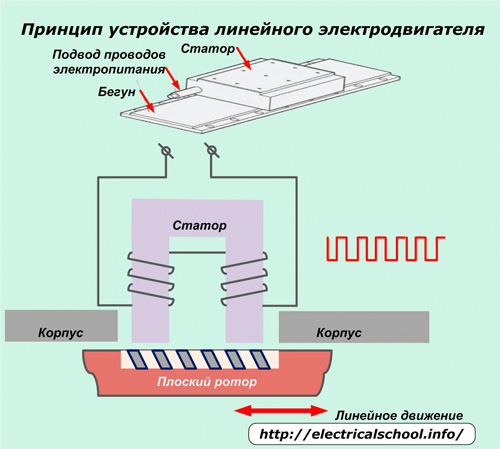
Ang stator at rotor nito ay pinahaba sa anyo ng mga piraso, sa halip na sugat sa mga singsing, tulad ng sa mga rotary electric motors.
Ang prinsipyo ng operasyon ay upang magbigay ng reciprocating linear motion sa runner rotor dahil sa paglipat ng electromagnetic energy mula sa isang nakatigil na stator na may bukas na magnetic circuit ng isang tiyak na haba. Ang isang gumaganang magnetic field ay nilikha sa loob nito sa pamamagitan ng sunud-sunod na paglipat sa kasalukuyang.
Ito ay kumikilos sa armature winding na may isang kolektor. Ang mga puwersa na nagmumula sa naturang motor ay gumagalaw lamang sa rotor sa isang linear na direksyon kasama ang mga elemento ng gabay.
Ang mga linear na motor ay idinisenyo upang gumana sa alinman sa direktang kasalukuyang o alternating current at maaaring gumana sa synchronous o asynchronous mode.
Ang mga disadvantages ng linear motors ay:
-
ang pagiging kumplikado ng teknolohiya;
-
mataas na presyo;
-
mababang kahusayan ng enerhiya.